blob: 84b1ad87d7a4e28238422656380fc47d7bae7868 (
plain)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
|
# earth_rover
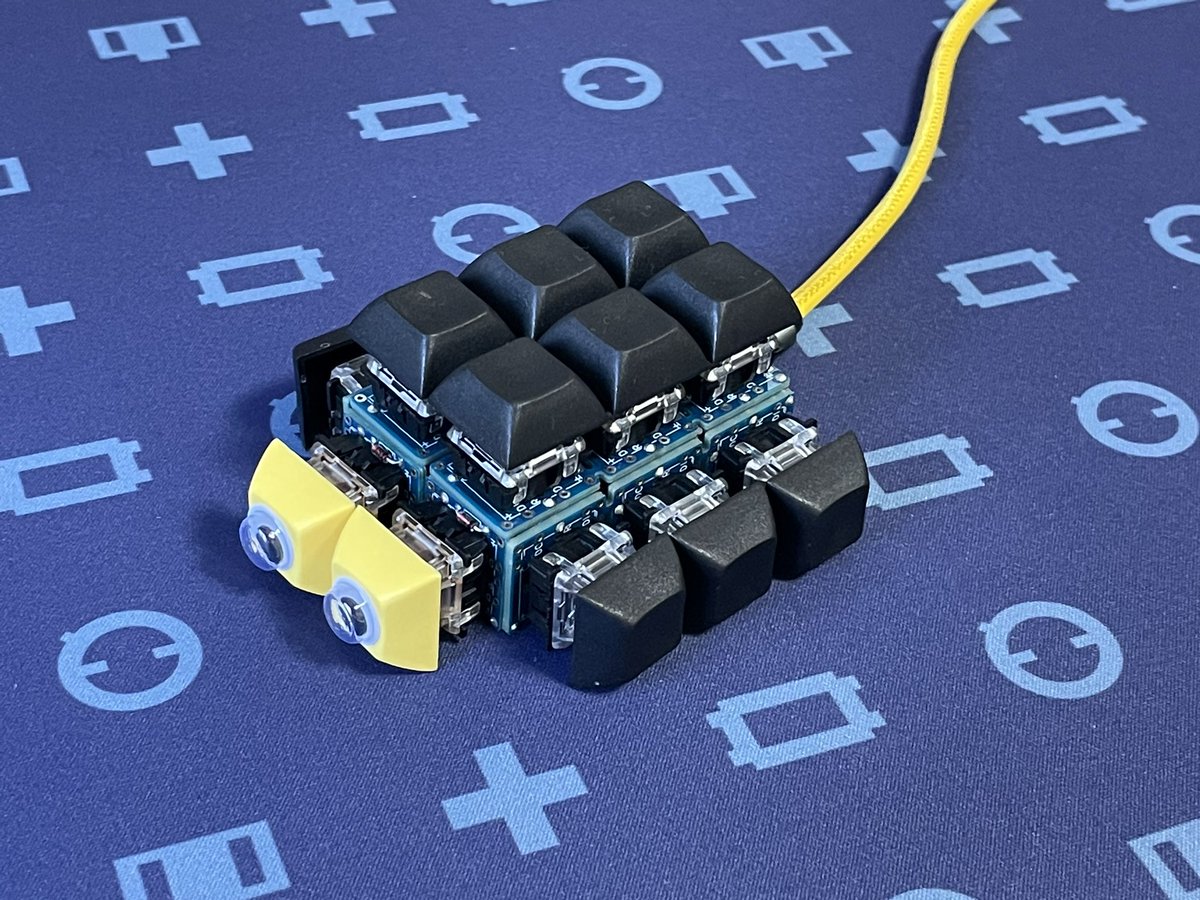
Mechanical warm, or just cubic macro pad.
* Keyboard Maintainer: [k.bigwheel](https://github.com/bigwheel)
* Build Guide: [bigwheel/earth\_rover](https://github.com/bigwheel/earth_rover)
* Hardware Supported: [無限の可能性 \| MxLEDBitPCB](https://swanmatch.github.io/MxLEDBitPCB/), Pro Micro
* Hardware Availability: [魔界鍵盤製作所 \- BOOTH](https://swanmatch.booth.pm/), [Pro Micro (コンスルー付き) \| 遊舎工房](https://yushakobo.jp/shop/promicro-spring-pinheader/)
Make example for this keyboard (after setting up your build environment):
make earth_rover:default
Reset Pro Micro by reset button on ProMicroSocket (Red LED must light).
Flashing example for this keyboard:
make earth_rover:default:flash
See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs).
|
