
diff options
Diffstat (limited to 'keyboards/handwired')
75 files changed, 6507 insertions, 77 deletions
diff --git a/keyboards/handwired/hnah40/config.h b/keyboards/handwired/hnah40/config.h new file mode 100644 index 0000000000..b7a4105d00 --- /dev/null +++ b/keyboards/handwired/hnah40/config.h @@ -0,0 +1,220 @@ +/* Copyright 2018 HnahKB + +This program is free software: you can redistribute it and/or modify +it under the terms of the GNU General Public License as published by +the Free Software Foundation, either version 2 of the License, or +(at your option) any later version. + +This program is distributed in the hope that it will be useful, +but WITHOUT ANY WARRANTY; without even the implied warranty of +MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the +GNU General Public License for more details. + +You should have received a copy of the GNU General Public License +along with this program. If not, see <http://www.gnu.org/licenses/>. +*/ + +#pragma once + +#include "config_common.h" + +/* USB Device descriptor parameter */ +#define VENDOR_ID 0xFEED +#define PRODUCT_ID 0x0000 +#define DEVICE_VER 0x0002 +#define MANUFACTURER HnahKB +#define PRODUCT hnah40 +#define DESCRIPTION Custom 40% PCB + +/* key matrix size */ +#define MATRIX_ROWS 4 +#define MATRIX_COLS 11 + +/* + * Keyboard Matrix Assignments + * + * Change this to how you wired your keyboard + * COLS: AVR pins used for columns, left to right + * ROWS: AVR pins used for rows, top to bottom + * DIODE_DIRECTION: COL2ROW = COL = Anode (+), ROW = Cathode (-, marked on diode) + * ROW2COL = ROW = Anode (+), COL = Cathode (-, marked on diode) + * +*/ +#define MATRIX_ROW_PINS { B4, B5, B3, D4 } +#define MATRIX_COL_PINS { B0, D7, D6, D5, B2, B1, C0, C1, C2, C3, D1 } +#define UNUSED_PINS + +/* COL2ROW, ROW2COL*/ +#define DIODE_DIRECTION COL2ROW + +// #define BACKLIGHT_PIN B7 +// #define BACKLIGHT_BREATHING +// #define BACKLIGHT_LEVELS 3 + +// #define RGB_DI_PIN E2 +// #ifdef RGB_DI_PIN +// #define RGBLIGHT_ANIMATIONS +// #define RGBLED_NUM 16 +// #define RGBLIGHT_HUE_STEP 8 +// #define RGBLIGHT_SAT_STEP 8 +// #define RGBLIGHT_VAL_STEP 8 +// #endif + +/* Debounce reduces chatter (unintended double-presses) - set 0 if debouncing is not needed */ +#define DEBOUNCING 5 + +/* define if matrix has ghost (lacks anti-ghosting diodes) */ +//#define MATRIX_HAS_GHOST + +/* number of backlight levels */ + +/* Mechanical locking support. Use KC_LCAP, KC_LNUM or KC_LSCR instead in keymap */ +#define LOCKING_SUPPORT_ENABLE +/* Locking resynchronize hack */ +#define LOCKING_RESYNC_ENABLE + +/* If defined, GRAVE_ESC will always act as ESC when CTRL is held. + * This is userful for the Windows task manager shortcut (ctrl+shift+esc). + */ +// #define GRAVE_ESC_CTRL_OVERRIDE + +/* + * Force NKRO + * + * Force NKRO (nKey Rollover) to be enabled by default, regardless of the saved + * state in the bootmagic EEPROM settings. (Note that NKRO must be enabled in the + * makefile for this to work.) + * + * If forced on, NKRO can be disabled via magic key (default = LShift+RShift+N) + * until the next keyboard reset. + * + * NKRO may prevent your keystrokes from being detected in the BIOS, but it is + * fully operational during normal computer usage. + * + * For a less heavy-handed approach, enable NKRO via magic key (LShift+RShift+N) + * or via bootmagic (hold SPACE+N while plugging in the keyboard). Once set by + * bootmagic, NKRO mode will always be enabled until it is toggled again during a + * power-up. + * + */ +//#define FORCE_NKRO + +/* + * Magic Key Options + * + * Magic keys are hotkey commands that allow control over firmware functions of + * the keyboard. They are best used in combination with the HID Listen program, + * found here: https://www.pjrc.com/teensy/hid_listen.html + * + * The options below allow the magic key functionality to be changed. This is + * useful if your keyboard/keypad is missing keys and you want magic key support. + * + */ + + + +/* control how magic key switches layers */ +//#define MAGIC_KEY_SWITCH_LAYER_WITH_FKEYS true +//#define MAGIC_KEY_SWITCH_LAYER_WITH_NKEYS true +//#define MAGIC_KEY_SWITCH_LAYER_WITH_CUSTOM false + +/* override magic key keymap */ +//#define MAGIC_KEY_SWITCH_LAYER_WITH_FKEYS +//#define MAGIC_KEY_SWITCH_LAYER_WITH_NKEYS +//#define MAGIC_KEY_SWITCH_LAYER_WITH_CUSTOM +//#define MAGIC_KEY_HELP1 H +//#define MAGIC_KEY_HELP2 SLASH +//#define MAGIC_KEY_DEBUG D +//#define MAGIC_KEY_DEBUG_MATRIX X +//#define MAGIC_KEY_DEBUG_KBD K +//#define MAGIC_KEY_DEBUG_MOUSE M +//#define MAGIC_KEY_VERSION V +//#define MAGIC_KEY_STATUS S +//#define MAGIC_KEY_CONSOLE C +//#define MAGIC_KEY_LAYER0_ALT1 ESC +//#define MAGIC_KEY_LAYER0_ALT2 GRAVE +//#define MAGIC_KEY_LAYER0 0 +//#define MAGIC_KEY_LAYER1 1 +//#define MAGIC_KEY_LAYER2 2 +//#define MAGIC_KEY_LAYER3 3 +//#define MAGIC_KEY_LAYER4 4 +//#define MAGIC_KEY_LAYER5 5 +//#define MAGIC_KEY_LAYER6 6 +//#define MAGIC_KEY_LAYER7 7 +//#define MAGIC_KEY_LAYER8 8 +//#define MAGIC_KEY_LAYER9 9 +//#define MAGIC_KEY_BOOTLOADER PAUSE +//#define MAGIC_KEY_LOCK CAPS +//#define MAGIC_KEY_EEPROM E +//#define MAGIC_KEY_NKRO N +//#define MAGIC_KEY_SLEEP_LED Z + +/* + * Feature disable options + * These options are also useful to firmware size reduction. + */ + +/* disable debug print */ +//#define NO_DEBUG + +/* disable print */ +//#define NO_PRINT + +/* disable action features */ +//#define NO_ACTION_LAYER +//#define NO_ACTION_TAPPING +//#define NO_ACTION_ONESHOT +//#define NO_ACTION_MACRO +//#define NO_ACTION_FUNCTION + +/* + * MIDI options + */ + +/* Prevent use of disabled MIDI features in the keymap */ +//#define MIDI_ENABLE_STRICT 1 + +/* enable basic MIDI features: + - MIDI notes can be sent when in Music mode is on +*/ +//#define MIDI_BASIC + +/* enable advanced MIDI features: + - MIDI notes can be added to the keymap + - Octave shift and transpose + - Virtual sustain, portamento, and modulation wheel + - etc. +*/ +//#define MIDI_ADVANCED + +/* override number of MIDI tone keycodes (each octave adds 12 keycodes and allocates 12 bytes) */ +//#define MIDI_TONE_KEYCODE_OCTAVES 1 + +/* + * HD44780 LCD Display Configuration + */ +/* +#define LCD_LINES 2 //< number of visible lines of the display +#define LCD_DISP_LENGTH 16 //< visibles characters per line of the display + +#define LCD_IO_MODE 1 //< 0: memory mapped mode, 1: IO port mode + +#if LCD_IO_MODE +#define LCD_PORT PORTB //< port for the LCD lines +#define LCD_DATA0_PORT LCD_PORT //< port for 4bit data bit 0 +#define LCD_DATA1_PORT LCD_PORT //< port for 4bit data bit 1 +#define LCD_DATA2_PORT LCD_PORT //< port for 4bit data bit 2 +#define LCD_DATA3_PORT LCD_PORT //< port for 4bit data bit 3 +#define LCD_DATA0_PIN 4 //< pin for 4bit data bit 0 +#define LCD_DATA1_PIN 5 //< pin for 4bit data bit 1 +#define LCD_DATA2_PIN 6 //< pin for 4bit data bit 2 +#define LCD_DATA3_PIN 7 //< pin for 4bit data bit 3 +#define LCD_RS_PORT LCD_PORT //< port for RS line +#define LCD_RS_PIN 3 //< pin for RS line +#define LCD_RW_PORT LCD_PORT //< port for RW line +#define LCD_RW_PIN 2 //< pin for RW line +#define LCD_E_PORT LCD_PORT //< port for Enable line +#define LCD_E_PIN 1 //< pin for Enable line +#endif +*/ + diff --git a/keyboards/handwired/hnah40/hnah40.c b/keyboards/handwired/hnah40/hnah40.c new file mode 100644 index 0000000000..0f08136c21 --- /dev/null +++ b/keyboards/handwired/hnah40/hnah40.c @@ -0,0 +1,43 @@ +/* Copyright 2019 HnahKB + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ +#include "hnah40.h" + +void matrix_init_kb(void) { + // put your keyboard start-up code here + // runs once when the firmware starts up + + matrix_init_user(); +} + +void matrix_scan_kb(void) { + // put your looping keyboard code here + // runs every cycle (a lot) + + matrix_scan_user(); +} + +bool process_record_kb(uint16_t keycode, keyrecord_t *record) { + // put your per-action keyboard code here + // runs for every action, just before processing by the firmware + + return process_record_user(keycode, record); +} + +void led_set_kb(uint8_t usb_led) { + // put your keyboard LED indicator (ex: Caps Lock LED) toggling code here + + led_set_user(usb_led); +} diff --git a/keyboards/handwired/hnah40/hnah40.h b/keyboards/handwired/hnah40/hnah40.h new file mode 100644 index 0000000000..28e09f6683 --- /dev/null +++ b/keyboards/handwired/hnah40/hnah40.h @@ -0,0 +1,38 @@ +/* Copyright 2019 HnahKB + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ +#pragma once + +#include "quantum.h" + +// This a shortcut to help you visually see your layout. +// The following is an example using the Planck MIT layout +// The first section contains all of the arguments representing the physical +// layout of the board and position of the keys +// The second converts the arguments into a two-dimensional array which +// represents the switch matrix. + +#define LAYOUT( \ + k00, k01, k02, k03, k04, k05, k06, k07, k08, k09, k0A, k39, \ + k10, k11, k12, k13, k14, k15, k16, k17, k18, k19, k1A, \ + k20, k21, k22, k23, k24, k25, k26, k27, k28, k29, k2A, \ + k30, k31, k32, k33, k35, k37, k38, k3A\ +) \ +{ \ + { k00, k01, k02, k03, k04, k05, k06, k07, k08, k09, k0A }, \ + { k10, k11, k12, k13, k14, k15, k16, k17, k18, k19, k1A }, \ + { k20, k21, k22, k23, k24, k25, k26, k27, k28, k29, k2A }, \ + { k30, k31, k32, k33, KC_NO, k35, KC_NO, k37, k38, k39, k3A }, \ +} diff --git a/keyboards/handwired/hnah40/info.json b/keyboards/handwired/hnah40/info.json new file mode 100644 index 0000000000..6a577a5207 --- /dev/null +++ b/keyboards/handwired/hnah40/info.json @@ -0,0 +1,54 @@ +{ + "keyboard_name": "Hnah40", + "url": "https://github.com/vuhopkep/PCB/tree/master/Hnah40-Atmega328p/PCB_V1/PCB", + "maintainer": "HnahKB", + "width": 12, + "height": 4, + "layouts": { + "LAYOUT": { + "layout": [ + {"label":"Esc", "x":0, "y":0}, + {"label":"Q", "x":1, "y":0}, + {"label":"W", "x":2, "y":0}, + {"label":"E", "x":3, "y":0}, + {"label":"R", "x":4, "y":0}, + {"label":"T", "x":5, "y":0}, + {"label":"Y", "x":6, "y":0}, + {"label":"U", "x":7, "y":0}, + {"label":"I", "x":8, "y":0}, + {"label":"O", "x":9, "y":0}, + {"label":"P", "x":10, "y":0}, + {"label":"BSPC", "x":11, "y":0}, + {"label":"Tab", "x":0, "y":1, "w":1.5}, + {"label":"A", "x":1.5, "y":1}, + {"label":"S", "x":2.5, "y":1}, + {"label":"D", "x":3.5, "y":1}, + {"label":"F", "x":4.5, "y":1}, + {"label":"G", "x":5.5, "y":1}, + {"label":"H", "x":6.5, "y":1}, + {"label":"J", "x":7.5, "y":1}, + {"label":"K", "x":8.5, "y":1}, + {"label":"L", "x":9.5, "y":1}, + {"label":"Enter", "x":10.5, "y":1, "w":1.5}, + {"label":"Shift", "x":0, "y":2, "w":1.75}, + {"label":"Z", "x":1.75, "y":2}, + {"label":"X", "x":2.75, "y":2}, + {"label":"C", "x":3.75, "y":2}, + {"label":"V", "x":4.75, "y":2}, + {"label":"B", "x":5.75, "y":2}, + {"label":"N", "x":6.75, "y":2}, + {"label":"M", "x":7.75, "y":2}, + {"label":",", "x":8.75, "y":2}, + {"label":"Shift", "x":9.75, "y":2, "w":2.25}, + {"label":"Ctrl", "x":0, "y":3, "w":1.25}, + {"label":"Win", "x":1.25, "y":3, "w":1.5}, + {"label":"Alt", "x":2.75, "y":3, "w":1.25}, + {"label":"Space", "x":4, "y":3, "w":2}, + {"label":"Space", "x":6, "y":3, "w":2}, + {"label":"App", "x":8, "y":3, "w":1.25}, + {"label":"Fn", "x":9.25, "y":3, "w":1.5}, + {"label":"Ctrl", "x":10.75, "y":3, "w":1.25} + ] + } + } +}
\ No newline at end of file diff --git a/keyboards/handwired/hnah40/keymaps/default/config.h b/keyboards/handwired/hnah40/keymaps/default/config.h new file mode 100644 index 0000000000..74412a948e --- /dev/null +++ b/keyboards/handwired/hnah40/keymaps/default/config.h @@ -0,0 +1,18 @@ +/* Copyright 2019 HnahKB + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +// place overrides here diff --git a/keyboards/handwired/hnah40/keymaps/default/keymap.c b/keyboards/handwired/hnah40/keymaps/default/keymap.c new file mode 100644 index 0000000000..2fc67ba5ec --- /dev/null +++ b/keyboards/handwired/hnah40/keymaps/default/keymap.c @@ -0,0 +1,48 @@ +/* Copyright 2019 HnahKB + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ +#include QMK_KEYBOARD_H + +// Defines the keycodes used by our macros in process_record_user +enum hnah_layers{ + _QWERTY, + _LOWER, + _RAISE +}; + + +#define LOWER MO(_LOWER) +#define RAISE MO(_RAISE) + +const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { + [_QWERTY] = LAYOUT( /* Base */ + KC_ESC, KC_Q, KC_W, KC_E, KC_R, KC_T, KC_Y, KC_U, KC_I, KC_O, KC_P, KC_BSPC, + LT(RAISE, KC_CAPS), KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_ENT, + KC_LSFT, KC_Z, KC_X, KC_C, KC_V, KC_B, KC_N, KC_M, KC_COMM, KC_DOT, KC_RSFT, + KC_LCTL, KC_LGUI, KC_LALT, KC_SPACE, KC_SPACE, KC_APP, LOWER, KC_RCTL + ), + [_LOWER] = LAYOUT( /* Base */ + RESET, KC_1, KC_2, KC_3, KC_4, KC_5, KC_6, KC_7, KC_8, KC_9, KC_0, KC_DEL, + RAISE, KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, KC_F6, KC_MINS, KC_EQL, KC_SCLN, KC_QUOT, + KC_LSFT, KC_F7, KC_F8, KC_F9, KC_F10, KC_F11, KC_F12, KC_COMM, KC_DOT, KC_SLSH, KC_SLSH, + KC_LCTL, KC_LGUI, KC_LALT, KC_SPACE, KC_SPACE, KC_APP, KC_TRNS, KC_RCTL + ), + [_RAISE] = LAYOUT( /* Base */ + RESET, KC_1, KC_UP, RGB_TOG, RGB_MOD, KC_5, KC_6, KC_7, KC_8, KC_9, KC_0, KC_DEL, + KC_TRNS, KC_LEFT, KC_DOWN, KC_RGHT , RGB_HUI, RGB_HUD, RGB_SAI, RGB_SAD, RGB_VAI, RGB_VAD, KC_ENT, + KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_UP, KC_TRNS, + KC_TRNS, KC_TRNS, KC_TRNS, KC_SPACE, KC_SPACE, KC_LEFT, KC_DOWN, KC_RGHT + ), +}; diff --git a/keyboards/handwired/hnah40/keymaps/default/readme.md b/keyboards/handwired/hnah40/keymaps/default/readme.md new file mode 100644 index 0000000000..b948ef9642 --- /dev/null +++ b/keyboards/handwired/hnah40/keymaps/default/readme.md @@ -0,0 +1 @@ +
\ No newline at end of file diff --git a/keyboards/handwired/hnah40/readme.md b/keyboards/handwired/hnah40/readme.md new file mode 100644 index 0000000000..20e2d71274 --- /dev/null +++ b/keyboards/handwired/hnah40/readme.md @@ -0,0 +1,20 @@ +# hnah40 + + + +A custom 40% keyboard PCB, insprired by Plaid keyboard from hsgw + + +Keyboard Maintainer: [vuhopkep](https://github.com/vuhopkep) +Hardware Availability: https://github.com/vuhopkep/PCB/tree/master/Hnah40-Atmega328p + +Make example for this keyboard (after setting up your build environment): + + make handwired/hnah40:default:program + +## Bootloader +use usbasploader from hsgw. +https://github.com/hsgw/USBaspLoader/tree/plaid + + +See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs). diff --git a/keyboards/handwired/hnah40/rules.mk b/keyboards/handwired/hnah40/rules.mk new file mode 100644 index 0000000000..efd11bfa5c --- /dev/null +++ b/keyboards/handwired/hnah40/rules.mk @@ -0,0 +1,73 @@ +# MCU name +MCU = atmega328p +PROTOCOL = VUSB + +# Processor frequency. +# This will define a symbol, F_CPU, in all source code files equal to the +# processor frequency in Hz. You can then use this symbol in your source code to +# calculate timings. Do NOT tack on a 'UL' at the end, this will be done +# automatically to create a 32-bit value in your source code. +# +# This will be an integer division of F_USB below, as it is sourced by +# F_USB after it has run through any CPU prescalers. Note that this value +# does not *change* the processor frequency - it should merely be updated to +# reflect the processor speed set externally so that the code can use accurate +# software delays. +F_CPU = 16000000 + + +# +# LUFA specific +# +# Target architecture (see library "Board Types" documentation). +ARCH = AVR8 + +# Input clock frequency. +# This will define a symbol, F_USB, in all source code files equal to the +# input clock frequency (before any prescaling is performed) in Hz. This value may +# differ from F_CPU if prescaling is used on the latter, and is required as the +# raw input clock is fed directly to the PLL sections of the AVR for high speed +# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL' +# at the end, this will be done automatically to create a 32-bit value in your +# source code. +# +# If no clock division is performed on the input clock inside the AVR (via the +# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU. +F_USB = $(F_CPU) + +# Interrupt driven control endpoint task(+60) +OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT + +BOOTLOADER = bootloadHID + +# Flash program via avrdude, but default command is not suitable. +# You can use hnah40:default:program +PROGRAM_CMD = avrdude -c usbasp -p m328p -U flash:w:$(BUILD_DIR)/$(TARGET).hex + + +# disable debug code +OPT_DEFS = -DDEBUG_LEVEL=0 + + +# Build Options +# change yes to no to disable +# +BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration(+1000) +MOUSEKEY_ENABLE = yes # Mouse keys(+4700) +EXTRAKEY_ENABLE = yes # Audio control and System control(+450) +CONSOLE_ENABLE = no # Console for debug(+400) +COMMAND_ENABLE = no # Commands for debug and configuration +# Do not enable SLEEP_LED_ENABLE. it uses the same timer as BACKLIGHT_ENABLE +SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend +# if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work +NKRO_ENABLE = no # USB Nkey Rollover +BACKLIGHT_ENABLE = no # Enable keyboard backlight functionality on B7 by default +RGBLIGHT_ENABLE = no # Enable keyboard RGB underglow +MIDI_ENABLE = no # MIDI support (+2400 to 4200, depending on config) +UNICODE_ENABLE = no # Unicode +BLUETOOTH_ENABLE = no # Enable Bluetooth with the Adafruit EZ-Key HID +AUDIO_ENABLE = no # Audio output on port C6 +FAUXCLICKY_ENABLE = no # Use buzzer to emulate clicky switches +HD44780_ENABLE = no # Enable support for HD44780 based LCDs (+400) +NO_UART = yes +NO_SUSPEND_POWER_DOWN = yes
\ No newline at end of file diff --git a/keyboards/handwired/hnah40/usbconfig.h b/keyboards/handwired/hnah40/usbconfig.h new file mode 100644 index 0000000000..cbd37c34dc --- /dev/null +++ b/keyboards/handwired/hnah40/usbconfig.h @@ -0,0 +1,397 @@ +/* Name: usbconfig.h + * Project: V-USB, virtual USB port for Atmel's(r) AVR(r) microcontrollers + * Author: Christian Starkjohann + * Creation Date: 2005-04-01 + * Tabsize: 4 + * Copyright: (c) 2005 by OBJECTIVE DEVELOPMENT Software GmbH + * License: GNU GPL v2 (see License.txt), GNU GPL v3 or proprietary (CommercialLicense.txt) + * This Revision: $Id: usbconfig-prototype.h 785 2010-05-30 17:57:07Z cs $ + */ + +#ifndef __usbconfig_h_included__ +#define __usbconfig_h_included__ + +#include "config.h" + +/* +General Description: +This file is an example configuration (with inline documentation) for the USB +driver. It configures V-USB for USB D+ connected to Port D bit 2 (which is +also hardware interrupt 0 on many devices) and USB D- to Port D bit 4. You may +wire the lines to any other port, as long as D+ is also wired to INT0 (or any +other hardware interrupt, as long as it is the highest level interrupt, see +section at the end of this file). +*/ + +/* ---------------------------- Hardware Config ---------------------------- */ + +#define USB_CFG_IOPORTNAME D +/* This is the port where the USB bus is connected. When you configure it to + * "B", the registers PORTB, PINB and DDRB will be used. + */ +#define USB_CFG_DMINUS_BIT 3 +/* This is the bit number in USB_CFG_IOPORT where the USB D- line is connected. + * This may be any bit in the port. + */ +#define USB_CFG_DPLUS_BIT 2 +/* This is the bit number in USB_CFG_IOPORT where the USB D+ line is connected. + * This may be any bit in the port. Please note that D+ must also be connected + * to interrupt pin INT0! [You can also use other interrupts, see section + * "Optional MCU Description" below, or you can connect D- to the interrupt, as + * it is required if you use the USB_COUNT_SOF feature. If you use D- for the + * interrupt, the USB interrupt will also be triggered at Start-Of-Frame + * markers every millisecond.] + */ +#define USB_CFG_CLOCK_KHZ (F_CPU/1000) +/* Clock rate of the AVR in kHz. Legal values are 12000, 12800, 15000, 16000, + * 16500, 18000 and 20000. The 12.8 MHz and 16.5 MHz versions of the code + * require no crystal, they tolerate +/- 1% deviation from the nominal + * frequency. All other rates require a precision of 2000 ppm and thus a + * crystal! + * Since F_CPU should be defined to your actual clock rate anyway, you should + * not need to modify this setting. + */ +#define USB_CFG_CHECK_CRC 0 +/* Define this to 1 if you want that the driver checks integrity of incoming + * data packets (CRC checks). CRC checks cost quite a bit of code size and are + * currently only available for 18 MHz crystal clock. You must choose + * USB_CFG_CLOCK_KHZ = 18000 if you enable this option. + */ + +/* ----------------------- Optional Hardware Config ------------------------ */ + +/* #define USB_CFG_PULLUP_IOPORTNAME D */ +/* If you connect the 1.5k pullup resistor from D- to a port pin instead of + * V+, you can connect and disconnect the device from firmware by calling + * the macros usbDeviceConnect() and usbDeviceDisconnect() (see usbdrv.h). + * This constant defines the port on which the pullup resistor is connected. + */ +/* #define USB_CFG_PULLUP_BIT 4 */ +/* This constant defines the bit number in USB_CFG_PULLUP_IOPORT (defined + * above) where the 1.5k pullup resistor is connected. See description + * above for details. + */ + +/* --------------------------- Functional Range ---------------------------- */ + +#define USB_CFG_HAVE_INTRIN_ENDPOINT 1 +/* Define this to 1 if you want to compile a version with two endpoints: The + * default control endpoint 0 and an interrupt-in endpoint (any other endpoint + * number). + */ +#define USB_CFG_HAVE_INTRIN_ENDPOINT3 1 +/* Define this to 1 if you want to compile a version with three endpoints: The + * default control endpoint 0, an interrupt-in endpoint 3 (or the number + * configured below) and a catch-all default interrupt-in endpoint as above. + * You must also define USB_CFG_HAVE_INTRIN_ENDPOINT to 1 for this feature. + */ +#define USB_CFG_EP3_NUMBER 3 +/* If the so-called endpoint 3 is used, it can now be configured to any other + * endpoint number (except 0) with this macro. Default if undefined is 3. + */ +/* #define USB_INITIAL_DATATOKEN USBPID_DATA1 */ +/* The above macro defines the startup condition for data toggling on the + * interrupt/bulk endpoints 1 and 3. Defaults to USBPID_DATA1. + * Since the token is toggled BEFORE sending any data, the first packet is + * sent with the oposite value of this configuration! + */ +#define USB_CFG_IMPLEMENT_HALT 0 +/* Define this to 1 if you also want to implement the ENDPOINT_HALT feature + * for endpoint 1 (interrupt endpoint). Although you may not need this feature, + * it is required by the standard. We have made it a config option because it + * bloats the code considerably. + */ +#define USB_CFG_SUPPRESS_INTR_CODE 0 +/* Define this to 1 if you want to declare interrupt-in endpoints, but don't + * want to send any data over them. If this macro is defined to 1, functions + * usbSetInterrupt() and usbSetInterrupt3() are omitted. This is useful if + * you need the interrupt-in endpoints in order to comply to an interface + * (e.g. HID), but never want to send any data. This option saves a couple + * of bytes in flash memory and the transmit buffers in RAM. + */ +#define USB_CFG_INTR_POLL_INTERVAL 1 +/* If you compile a version with endpoint 1 (interrupt-in), this is the poll + * interval. The value is in milliseconds and must not be less than 10 ms for + * low speed devices. + */ +#define USB_CFG_IS_SELF_POWERED 0 +/* Define this to 1 if the device has its own power supply. Set it to 0 if the + * device is powered from the USB bus. + */ +// max power draw with maxed white underglow measured at 120 mA (peaks) +#define USB_CFG_MAX_BUS_POWER 100 +/* Set this variable to the maximum USB bus power consumption of your device. + * The value is in milliamperes. [It will be divided by two since USB + * communicates power requirements in units of 2 mA.] + */ +#define USB_CFG_IMPLEMENT_FN_WRITE 1 +/* Set this to 1 if you want usbFunctionWrite() to be called for control-out + * transfers. Set it to 0 if you don't need it and want to save a couple of + * bytes. + */ +#define USB_CFG_IMPLEMENT_FN_READ 0 +/* Set this to 1 if you need to send control replies which are generated + * "on the fly" when usbFunctionRead() is called. If you only want to send + * data from a static buffer, set it to 0 and return the data from + * usbFunctionSetup(). This saves a couple of bytes. + */ +#define USB_CFG_IMPLEMENT_FN_WRITEOUT 0 +/* Define this to 1 if you want to use interrupt-out (or bulk out) endpoints. + * You must implement the function usbFunctionWriteOut() which receives all + * interrupt/bulk data sent to any endpoint other than 0. The endpoint number + * can be found in 'usbRxToken'. + */ +#define USB_CFG_HAVE_FLOWCONTROL 0 +/* Define this to 1 if you want flowcontrol over USB data. See the definition + * of the macros usbDisableAllRequests() and usbEnableAllRequests() in + * usbdrv.h. + */ +#define USB_CFG_DRIVER_FLASH_PAGE 0 +/* If the device has more than 64 kBytes of flash, define this to the 64 k page + * where the driver's constants (descriptors) are located. Or in other words: + * Define this to 1 for boot loaders on the ATMega128. + */ +#define USB_CFG_LONG_TRANSFERS 0 +/* Define this to 1 if you want to send/receive blocks of more than 254 bytes + * in a single control-in or control-out transfer. Note that the capability + * for long transfers increases the driver size. + */ +/* #define USB_RX_USER_HOOK(data, len) if(usbRxToken == (uchar)USBPID_SETUP) blinkLED(); */ +/* This macro is a hook if you want to do unconventional things. If it is + * defined, it's inserted at the beginning of received message processing. + * If you eat the received message and don't want default processing to + * proceed, do a return after doing your things. One possible application + * (besides debugging) is to flash a status LED on each packet. + */ +/* #define USB_RESET_HOOK(resetStarts) if(!resetStarts){hadUsbReset();} */ +/* This macro is a hook if you need to know when an USB RESET occurs. It has + * one parameter which distinguishes between the start of RESET state and its + * end. + */ +/* #define USB_SET_ADDRESS_HOOK() hadAddressAssigned(); */ +/* This macro (if defined) is executed when a USB SET_ADDRESS request was + * received. + */ +#define USB_COUNT_SOF 0 +/* define this macro to 1 if you need the global variable "usbSofCount" which + * counts SOF packets. This feature requires that the hardware interrupt is + * connected to D- instead of D+. + */ +/* #ifdef __ASSEMBLER__ + * macro myAssemblerMacro + * in YL, TCNT0 + * sts timer0Snapshot, YL + * endm + * #endif + * #define USB_SOF_HOOK myAssemblerMacro + * This macro (if defined) is executed in the assembler module when a + * Start Of Frame condition is detected. It is recommended to define it to + * the name of an assembler macro which is defined here as well so that more + * than one assembler instruction can be used. The macro may use the register + * YL and modify SREG. If it lasts longer than a couple of cycles, USB messages + * immediately after an SOF pulse may be lost and must be retried by the host. + * What can you do with this hook? Since the SOF signal occurs exactly every + * 1 ms (unless the host is in sleep mode), you can use it to tune OSCCAL in + * designs running on the internal RC oscillator. + * Please note that Start Of Frame detection works only if D- is wired to the + * interrupt, not D+. THIS IS DIFFERENT THAN MOST EXAMPLES! + */ +#define USB_CFG_CHECK_DATA_TOGGLING 0 +/* define this macro to 1 if you want to filter out duplicate data packets + * sent by the host. Duplicates occur only as a consequence of communication + * errors, when the host does not receive an ACK. Please note that you need to + * implement the filtering yourself in usbFunctionWriteOut() and + * usbFunctionWrite(). Use the global usbCurrentDataToken and a static variable + * for each control- and out-endpoint to check for duplicate packets. + */ +#define USB_CFG_HAVE_MEASURE_FRAME_LENGTH 0 +/* define this macro to 1 if you want the function usbMeasureFrameLength() + * compiled in. This function can be used to calibrate the AVR's RC oscillator. + */ +#define USB_USE_FAST_CRC 0 +/* The assembler module has two implementations for the CRC algorithm. One is + * faster, the other is smaller. This CRC routine is only used for transmitted + * messages where timing is not critical. The faster routine needs 31 cycles + * per byte while the smaller one needs 61 to 69 cycles. The faster routine + * may be worth the 32 bytes bigger code size if you transmit lots of data and + * run the AVR close to its limit. + */ + +/* -------------------------- Device Description --------------------------- */ + +#define USB_CFG_VENDOR_ID (VENDOR_ID & 0xFF), ((VENDOR_ID >> 8) & 0xFF) +/* USB vendor ID for the device, low byte first. If you have registered your + * own Vendor ID, define it here. Otherwise you may use one of obdev's free + * shared VID/PID pairs. Be sure to read USB-IDs-for-free.txt for rules! + * *** IMPORTANT NOTE *** + * This template uses obdev's shared VID/PID pair for Vendor Class devices + * with libusb: 0x16c0/0x5dc. Use this VID/PID pair ONLY if you understand + * the implications! + */ +#define USB_CFG_DEVICE_ID (PRODUCT_ID & 0xFF), ((PRODUCT_ID >> 8) & 0xFF) +/* This is the ID of the product, low byte first. It is interpreted in the + * scope of the vendor ID. If you have registered your own VID with usb.org + * or if you have licensed a PID from somebody else, define it here. Otherwise + * you may use one of obdev's free shared VID/PID pairs. See the file + * USB-IDs-for-free.txt for details! + * *** IMPORTANT NOTE *** + * This template uses obdev's shared VID/PID pair for Vendor Class devices + * with libusb: 0x16c0/0x5dc. Use this VID/PID pair ONLY if you understand + * the implications! + */ +#define USB_CFG_DEVICE_VERSION 0x00, 0x01 +/* Version number of the device: Minor number first, then major number. + */ +#define USB_CFG_VENDOR_NAME 'H','n','a','h','K','B' +#define USB_CFG_VENDOR_NAME_LEN 6 +/* These two values define the vendor name returned by the USB device. The name + * must be given as a list of characters under single quotes. The characters + * are interpreted as Unicode (UTF-16) entities. + * If you don't want a vendor name string, undefine these macros. + * ALWAYS define a vendor name containing your Internet domain name if you use + * obdev's free shared VID/PID pair. See the file USB-IDs-for-free.txt for + * details. + */ +#define USB_CFG_DEVICE_NAME 'H', 'n', 'a', 'h', '4', '0' +#define USB_CFG_DEVICE_NAME_LEN 6 +/* Same as above for the device name. If you don't want a device name, undefine + * the macros. See the file USB-IDs-for-free.txt before you assign a name if + * you use a shared VID/PID. + */ +#define USB_CFG_SERIAL_NUMBER 'H','n','a','h','K','B' +#define USB_CFG_SERIAL_NUMBER_LEN 6 +/* Same as above for the serial number. If you don't want a serial number, + * undefine the macros. + * It may be useful to provide the serial number through other means than at + * compile time. See the section about descriptor properties below for how + * to fine tune control over USB descriptors such as the string descriptor + * for the serial number. + */ +#define USB_CFG_DEVICE_CLASS 0 +#define USB_CFG_DEVICE_SUBCLASS 0 +/* See USB specification if you want to conform to an existing device class. + * Class 0xff is "vendor specific". + */ +#define USB_CFG_INTERFACE_CLASS 3 /* HID */ +#define USB_CFG_INTERFACE_SUBCLASS 1 /* Boot */ +#define USB_CFG_INTERFACE_PROTOCOL 1 /* Keyboard */ +/* See USB specification if you want to conform to an existing device class or + * protocol. The following classes must be set at interface level: + * HID class is 3, no subclass and protocol required (but may be useful!) + * CDC class is 2, use subclass 2 and protocol 1 for ACM + */ +#define USB_CFG_HID_REPORT_DESCRIPTOR_LENGTH 0 +/* Define this to the length of the HID report descriptor, if you implement + * an HID device. Otherwise don't define it or define it to 0. + * If you use this define, you must add a PROGMEM character array named + * "usbHidReportDescriptor" to your code which contains the report descriptor. + * Don't forget to keep the array and this define in sync! + */ + +/* #define USB_PUBLIC static */ +/* Use the define above if you #include usbdrv.c instead of linking against it. + * This technique saves a couple of bytes in flash memory. + */ + +/* ------------------- Fine Control over USB Descriptors ------------------- */ +/* If you don't want to use the driver's default USB descriptors, you can + * provide our own. These can be provided as (1) fixed length static data in + * flash memory, (2) fixed length static data in RAM or (3) dynamically at + * runtime in the function usbFunctionDescriptor(). See usbdrv.h for more + * information about this function. + * Descriptor handling is configured through the descriptor's properties. If + * no properties are defined or if they are 0, the default descriptor is used. + * Possible properties are: + * + USB_PROP_IS_DYNAMIC: The data for the descriptor should be fetched + * at runtime via usbFunctionDescriptor(). If the usbMsgPtr mechanism is + * used, the data is in FLASH by default. Add property USB_PROP_IS_RAM if + * you want RAM pointers. + * + USB_PROP_IS_RAM: The data returned by usbFunctionDescriptor() or found + * in static memory is in RAM, not in flash memory. + * + USB_PROP_LENGTH(len): If the data is in static memory (RAM or flash), + * the driver must know the descriptor's length. The descriptor itself is + * found at the address of a well known identifier (see below). + * List of static descriptor names (must be declared PROGMEM if in flash): + * char usbDescriptorDevice[]; + * char usbDescriptorConfiguration[]; + * char usbDescriptorHidReport[]; + * char usbDescriptorString0[]; + * int usbDescriptorStringVendor[]; + * int usbDescriptorStringDevice[]; + * int usbDescriptorStringSerialNumber[]; + * Other descriptors can't be provided statically, they must be provided + * dynamically at runtime. + * + * Descriptor properties are or-ed or added together, e.g.: + * #define USB_CFG_DESCR_PROPS_DEVICE (USB_PROP_IS_RAM | USB_PROP_LENGTH(18)) + * + * The following descriptors are defined: + * USB_CFG_DESCR_PROPS_DEVICE + * USB_CFG_DESCR_PROPS_CONFIGURATION + * USB_CFG_DESCR_PROPS_STRINGS + * USB_CFG_DESCR_PROPS_STRING_0 + * USB_CFG_DESCR_PROPS_STRING_VENDOR + * USB_CFG_DESCR_PROPS_STRING_PRODUCT + * USB_CFG_DESCR_PROPS_STRING_SERIAL_NUMBER + * USB_CFG_DESCR_PROPS_HID + * USB_CFG_DESCR_PROPS_HID_REPORT + * USB_CFG_DESCR_PROPS_UNKNOWN (for all descriptors not handled by the driver) + * + * Note about string descriptors: String descriptors are not just strings, they + * are Unicode strings prefixed with a 2 byte header. Example: + * int serialNumberDescriptor[] = { + * USB_STRING_DESCRIPTOR_HEADER(6), + * 'S', 'e', 'r', 'i', 'a', 'l' + * }; + */ + +#define USB_CFG_DESCR_PROPS_DEVICE 0 +#define USB_CFG_DESCR_PROPS_CONFIGURATION USB_PROP_IS_DYNAMIC +//#define USB_CFG_DESCR_PROPS_CONFIGURATION 0 +#define USB_CFG_DESCR_PROPS_STRINGS 0 +#define USB_CFG_DESCR_PROPS_STRING_0 0 +#define USB_CFG_DESCR_PROPS_STRING_VENDOR 0 +#define USB_CFG_DESCR_PROPS_STRING_PRODUCT 0 +#define USB_CFG_DESCR_PROPS_STRING_SERIAL_NUMBER 0 +#define USB_CFG_DESCR_PROPS_HID USB_PROP_IS_DYNAMIC +//#define USB_CFG_DESCR_PROPS_HID 0 +#define USB_CFG_DESCR_PROPS_HID_REPORT USB_PROP_IS_DYNAMIC +//#define USB_CFG_DESCR_PROPS_HID_REPORT 0 +#define USB_CFG_DESCR_PROPS_UNKNOWN 0 + +#define usbMsgPtr_t unsigned short +/* If usbMsgPtr_t is not defined, it defaults to 'uchar *'. We define it to + * a scalar type here because gcc generates slightly shorter code for scalar + * arithmetics than for pointer arithmetics. Remove this define for backward + * type compatibility or define it to an 8 bit type if you use data in RAM only + * and all RAM is below 256 bytes (tiny memory model in IAR CC). + */ + +/* ----------------------- Optional MCU Description ------------------------ */ + +/* The following configurations have working defaults in usbdrv.h. You + * usually don't need to set them explicitly. Only if you want to run + * the driver on a device which is not yet supported or with a compiler + * which is not fully supported (such as IAR C) or if you use a differnt + * interrupt than INT0, you may have to define some of these. + */ +/* #define USB_INTR_CFG MCUCR */ +/* #define USB_INTR_CFG_SET ((1 << ISC00) | (1 << ISC01)) */ +/* #define USB_INTR_CFG_CLR 0 */ +/* #define USB_INTR_ENABLE GIMSK */ +/* #define USB_INTR_ENABLE_BIT INT0 */ +/* #define USB_INTR_PENDING GIFR */ +/* #define USB_INTR_PENDING_BIT INTF0 */ +/* #define USB_INTR_VECTOR INT0_vect */ + +/* Set INT1 for D- falling edge to count SOF */ +/* #define USB_INTR_CFG EICRA */ +// #define USB_INTR_CFG_SET ((1 << ISC11) | (0 << ISC10)) +// /* #define USB_INTR_CFG_CLR 0 */ +// /* #define USB_INTR_ENABLE EIMSK */ +// #define USB_INTR_ENABLE_BIT INT1 +// /* #define USB_INTR_PENDING EIFR */ +// #define USB_INTR_PENDING_BIT INTF1 +// #define USB_INTR_VECTOR INT1_vect + +#endif /* __usbconfig_h_included__ */ diff --git a/keyboards/handwired/jopr/config.h b/keyboards/handwired/jopr/config.h new file mode 100644 index 0000000000..aece709156 --- /dev/null +++ b/keyboards/handwired/jopr/config.h @@ -0,0 +1,49 @@ +#pragma once + +#include "config_common.h" + +/* USB Device descriptor parameter */ +#define VENDOR_ID 0x4DAE +#define PRODUCT_ID 0x1000 +#define DEVICE_VER 0x0001 +#define MANUFACTURER joelproko +#define PRODUCT jopr-106-Nl2SR-Cl2nL +#define DESCRIPTION jopr-106 Mechanical Keyboard + +/* key matrix size */ +#define MATRIX_ROWS 10 +#define MATRIX_COLS 11 + +/* key matrix pins */ +#define MATRIX_ROW_PINS { D0, D6, D2, D4, D3, D5, D7, C6, B6, F5 } +#define MATRIX_COL_PINS { B3, B2, B1, B0, F7, E6, F6, B5, C7, B4, D1 } +#define UNUSED_PINS { B7 } + +/* COL2ROW or ROW2COL */ +#define DIODE_DIRECTION COL2ROW + +/* number of backlight levels */ +#ifdef BACKLIGHT_PIN +#define BACKLIGHT_LEVELS 0 +#endif + +/* Set 0 if debouncing isn't needed */ +#define DEBOUNCE 5 + +/* Mechanical locking support. Use KC_LCAP, KC_LNUM or KC_LSCR instead in keymap */ +/* #define LOCKING_SUPPORT_ENABLE */ + +/* Locking resynchronize hack */ +#define LOCKING_RESYNC_ENABLE +/* #define IS_COMMAND() (get_mods() == (MOD_BIT(KC_LSHIFT) | MOD_BIT(KC_RSHIFT))) */ +#define NO_ACTION_ONESHOT +#define TAPPING_TOGGLE 3 + +/*#define RGB_DI_PIN F4*/ +#ifdef RGB_DI_PIN +/*#define RGBLIGHT_ANIMATIONS*/ +#define RGBLED_NUM 1 +#define RGBLIGHT_HUE_STEP 1 +#define RGBLIGHT_SAT_STEP 1 +#define RGBLIGHT_VAL_STEP 1 +#endif diff --git a/keyboards/handwired/jopr/info.json b/keyboards/handwired/jopr/info.json new file mode 100644 index 0000000000..c4cadb8c3e --- /dev/null +++ b/keyboards/handwired/jopr/info.json @@ -0,0 +1,562 @@ +{ + "keyboard_name": "jopr-106", + "url": "https://github.com/joelproko/keyboard_layout_jopr", + "maintainer": "joelproko", + "width": 22.5, + "height": 6.25, + "layouts": { + "LAYOUT": { + "key_count": 106, + "layout": [ + { + "label": "MX_A0", + "x": 0, + "y": 0 + }, + { + "label": "MX_B0", + "x": 1.25, + "y": 0 + }, + { + "label": "MX_C0", + "x": 2.25, + "y": 0 + }, + { + "label": "MX_D0", + "x": 3.25, + "y": 0 + }, + { + "label": "MX_E0", + "x": 4.25, + "y": 0 + }, + { + "label": "MX_F0", + "x": 5.5, + "y": 0 + }, + { + "label": "MX_G0", + "x": 6.5, + "y": 0 + }, + { + "label": "MX_H0", + "x": 7.5, + "y": 0 + }, + { + "label": "MX_I0", + "x": 8.5, + "y": 0 + }, + { + "label": "MX_J0", + "x": 9.75, + "y": 0 + }, + { + "label": "MX_A6", + "x": 10.75, + "y": 0 + }, + { + "label": "MX_B6", + "x": 11.75, + "y": 0 + }, + { + "label": "MX_C6", + "x": 12.75, + "y": 0 + }, + { + "label": "MX_D6", + "x": 14, + "y": 0 + }, + { + "label": "MX_E6", + "x": 15.25, + "y": 0 + }, + { + "label": "MX_F6", + "x": 16.25, + "y": 0 + }, + { + "label": "MX_G6", + "x": 17.25, + "y": 0 + }, + { + "label": "MX_H6", + "x": 18.25, + "y": 0 + }, + { + "label": "MX_A1", + "x": 0, + "y": 1.25 + }, + { + "label": "MX_B1", + "x": 1, + "y": 1.25 + }, + { + "label": "MX_C1", + "x": 2, + "y": 1.25 + }, + { + "label": "MX_D1", + "x": 3, + "y": 1.25 + }, + { + "label": "MX_E1", + "x": 4, + "y": 1.25 + }, + { + "label": "MX_F1", + "x": 5, + "y": 1.25 + }, + { + "label": "MX_G1", + "x": 6, + "y": 1.25 + }, + { + "label": "MX_H1", + "x": 7, + "y": 1.25 + }, + { + "label": "MX_I1", + "x": 8, + "y": 1.25 + }, + { + "label": "MX_J1", + "x": 9, + "y": 1.25 + }, + { + "label": "MX_A7", + "x": 10, + "y": 1.25 + }, + { + "label": "MX_B7", + "x": 11, + "y": 1.25 + }, + { + "label": "MX_C7", + "x": 12, + "y": 1.25 + }, + { + "label": "MX_D7", + "x": 13, + "y": 1.25, + "w": 2 + }, + { + "label": "MX_E7", + "x": 15.25, + "y": 1.25 + }, + { + "label": "MX_F7", + "x": 16.25, + "y": 1.25 + }, + { + "label": "MX_G7", + "x": 17.25, + "y": 1.25 + }, + { + "label": "MX_H7", + "x": 18.25, + "y": 1.25 + }, + { + "label": "MX_A2", + "x": 0, + "y": 2.25, + "w": 1.5 + }, + { + "label": "MX_B2", + "x": 1.5, + "y": 2.25 + }, + { + "label": "MX_C2", + "x": 2.5, + "y": 2.25 + }, + { + "label": "MX_D2", + "x": 3.5, + "y": 2.25 + }, + { + "label": "MX_E2", + "x": 4.5, + "y": 2.25 + }, + { + "label": "MX_F2", + "x": 5.5, + "y": 2.25 + }, + { + "label": "MX_G2", + "x": 6.5, + "y": 2.25 + }, + { + "label": "MX_H2", + "x": 7.5, + "y": 2.25 + }, + { + "label": "MX_I2", + "x": 8.5, + "y": 2.25 + }, + { + "label": "MX_J2", + "x": 9.5, + "y": 2.25 + }, + { + "label": "MX_A8", + "x": 10.5, + "y": 2.25 + }, + { + "label": "MX_B8", + "x": 11.5, + "y": 2.25 + }, + { + "label": "MX_C8", + "x": 12.5, + "y": 2.25 + }, + { + "label": "MX_D8", + "x": 13.75, + "y": 2.25, + "w": 1.25, + "h": 2 + }, + { + "label": "MX_E8", + "x": 15.25, + "y": 2.25 + }, + { + "label": "MX_F8", + "x": 16.25, + "y": 2.25 + }, + { + "label": "MX_G8", + "x": 17.25, + "y": 2.25 + }, + { + "label": "MX_H8", + "x": 18.25, + "y": 2.25, + "h": 2 + }, + { + "label": "MX_A3", + "x": 0, + "y": 3.25, + "w": 1.75 + }, + { + "label": "MX_B3", + "x": 1.75, + "y": 3.25 + }, + { + "label": "MX_C3", + "x": 2.75, + "y": 3.25 + }, + { + "label": "MX_D3", + "x": 3.75, + "y": 3.25 + }, + { + "label": "MX_E3", + "x": 4.75, + "y": 3.25 + }, + { + "label": "MX_F3", + "x": 5.75, + "y": 3.25 + }, + { + "label": "MX_G3", + "x": 6.75, + "y": 3.25 + }, + { + "label": "MX_H3", + "x": 7.75, + "y": 3.25 + }, + { + "label": "MX_I3", + "x": 8.75, + "y": 3.25 + }, + { + "label": "MX_J3", + "x": 9.75, + "y": 3.25 + }, + { + "label": "MX_A9", + "x": 10.75, + "y": 3.25 + }, + { + "label": "MX_B9", + "x": 11.75, + "y": 3.25 + }, + { + "label": "MX_C9", + "x": 12.75, + "y": 3.25 + }, + { + "label": "MX_E9", + "x": 15.25, + "y": 3.25 + }, + { + "label": "MX_F9", + "x": 16.25, + "y": 3.25 + }, + { + "label": "MX_G9", + "x": 17.25, + "y": 3.25 + }, + { + "label": "MX_H9", + "x": 19.5, + "y": 3.25 + }, + { + "label": "MX_K1", + "x": 20.5, + "y": 3.25 + }, + { + "label": "MX_K0", + "x": 21.5, + "y": 3.25 + }, + { + "label": "MX_A4", + "x": 0, + "y": 4.25, + "w": 1.25 + }, + { + "label": "MX_B4", + "x": 1.25, + "y": 4.25 + }, + { + "label": "MX_C4", + "x": 2.25, + "y": 4.25 + }, + { + "label": "MX_D4", + "x": 3.25, + "y": 4.25 + }, + { + "label": "MX_E4", + "x": 4.25, + "y": 4.25 + }, + { + "label": "MX_F4", + "x": 5.25, + "y": 4.25 + }, + { + "label": "MX_G4", + "x": 6.25, + "y": 4.25 + }, + { + "label": "MX_H4", + "x": 7.25, + "y": 4.25 + }, + { + "label": "MX_I4", + "x": 8.25, + "y": 4.25 + }, + { + "label": "MX_J4", + "x": 9.25, + "y": 4.25 + }, + { + "label": "MX_I9", + "x": 10.25, + "y": 4.25 + }, + { + "label": "MX_I8", + "x": 11.25, + "y": 4.25 + }, + { + "label": "MX_I7", + "x": 12.25, + "y": 4.25, + "w": 2.75 + }, + { + "label": "MX_I6", + "x": 15.25, + "y": 4.25 + }, + { + "label": "MX_J9", + "x": 16.25, + "y": 4.25 + }, + { + "label": "MX_J8", + "x": 17.25, + "y": 4.25 + }, + { + "label": "MX_J7", + "x": 18.25, + "y": 4.25, + "h": 2 + }, + { + "label": "MX_J6", + "x": 19.5, + "y": 4.25 + }, + { + "label": "MX_K3", + "x": 20.5, + "y": 4.25 + }, + { + "label": "MX_K2", + "x": 21.5, + "y": 4.25 + }, + { + "label": "MX_A5", + "x": 0, + "y": 5.25, + "w": 1.25 + }, + { + "label": "MX_B5", + "x": 1.25, + "y": 5.25, + "w": 1.25 + }, + { + "label": "MX_C5", + "x": 2.5, + "y": 5.25, + "w": 1.25 + }, + { + "label": "MX_D5", + "x": 3.75, + "y": 5.25, + "w": 6.25 + }, + { + "label": "MX_J5", + "x": 10, + "y": 5.25, + "w": 1.25 + }, + { + "label": "MX_I5", + "x": 11.25, + "y": 5.25, + "w": 1.25 + }, + { + "label": "MX_K9", + "x": 12.5, + "y": 5.25, + "w": 1.25 + }, + { + "label": "MX_E5", + "x": 13.75, + "y": 5.25, + "w": 1.25 + }, + { + "label": "MX_K8", + "x": 15.25, + "y": 5.25, + "w": 2 + }, + { + "label": "MX_K7", + "x": 17.25, + "y": 5.25 + }, + { + "label": "MX_K6", + "x": 19.5, + "y": 5.25 + }, + { + "label": "MX_K5", + "x": 20.5, + "y": 5.25 + }, + { + "label": "MX_K4", + "x": 21.5, + "y": 5.25 + } + ] + } + } +} diff --git a/keyboards/handwired/jopr/jopr.c b/keyboards/handwired/jopr/jopr.c new file mode 100644 index 0000000000..3dccb719c2 --- /dev/null +++ b/keyboards/handwired/jopr/jopr.c @@ -0,0 +1,11 @@ +#include "jopr.h" +void matrix_init_kb(void) { + matrix_init_user(); + led_init_ports(); +}; + +void led_init_ports(void) { + setPinOutput(F0); + setPinOutput(F1); + setPinOutput(F4); +}
\ No newline at end of file diff --git a/keyboards/handwired/jopr/jopr.h b/keyboards/handwired/jopr/jopr.h new file mode 100644 index 0000000000..b79a8f2646 --- /dev/null +++ b/keyboards/handwired/jopr/jopr.h @@ -0,0 +1,24 @@ +#pragma once + +#include "quantum.h" + +#define LAYOUT( \ + K000, K001, K002, K003, K004, K005, K006, K007, K008, K009, K600, K601, K602, K603, K604, K605, K606, K607, \ + K100, K101, K102, K103, K104, K105, K106, K107, K108, K109, K700, K701, K702, K703, K704, K705, K706, K707, \ + K200, K201, K202, K203, K204, K205, K206, K207, K208, K209, K800, K801, K802, K803, K804, K805, K806, K807, \ + K300, K301, K302, K303, K304, K305, K306, K307, K308, K309, K900, K901, K902, K904, K905, K906, K907, K110, K010, \ + K400, K401, K402, K403, K404, K405, K406, K407, K408, K409, K908, K808, K708, K608, K909, K809, K709, K609, K310, K210, \ + K500, K501, K502, K503, K509, K508, K910, K504, K810, K710, K610, K510, K410 \ +) \ +{ \ + { K000, K001, K002, K003, K004, K005, K006, K007, K008, K009, K010 }, \ + { K100, K101, K102, K103, K104, K105, K106, K107, K108, K109, K110 }, \ + { K200, K201, K202, K203, K204, K205, K206, K207, K208, K209, K210 }, \ + { K300, K301, K302, K303, K304, K305, K306, K307, K308, K309, K310 }, \ + { K400, K401, K402, K403, K404, K405, K406, K407, K408, K409, K410 }, \ + { K500, K501, K502, K503, K504, KC_NO, KC_NO, KC_NO, K508, K509, K510 }, \ + { K600, K601, K602, K603, K604, K605, K606, K607, K608, K609, K610 }, \ + { K700, K701, K702, K703, K704, K705, K706, K707, K708, K709, K710 }, \ + { K800, K801, K802, K803, K804, K805, K806, K807, K808, K809, K810 }, \ + { K900, K901, K902, KC_NO, K904, K905, K906, K907, K908, K909, K910 } \ +} diff --git a/keyboards/handwired/jopr/keymaps/default/keymap.c b/keyboards/handwired/jopr/keymaps/default/keymap.c new file mode 100644 index 0000000000..d6b998f49b --- /dev/null +++ b/keyboards/handwired/jopr/keymaps/default/keymap.c @@ -0,0 +1,59 @@ +#include QMK_KEYBOARD_H + +#define _BL 0 +#define _FN 1 +const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { + + [_BL] = LAYOUT( + KC_ESC, KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_F11, KC_F12, KC_DEL, KC_NO, KC_CAPS, KC_SLCK, KC_PAUS, + KC_GRV, KC_1, KC_2, KC_3, KC_4, KC_5, KC_6, KC_7, KC_8, KC_9, KC_0, KC_MINS, KC_EQL, KC_BSPC, KC_PSCR, KC_PSLS, KC_PAST, KC_PMNS, + KC_TAB, KC_Q, KC_W, KC_E, KC_R, KC_T, KC_Y, KC_U, KC_I, KC_O, KC_P, KC_LBRC, KC_RBRC, KC_ENT, KC_P7, KC_P8, KC_P9, KC_PPLS, + KC_MHEN, KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_SCLN, KC_QUOT, KC_NUHS, KC_P4, KC_P5, KC_P6, KC_PGUP, KC_INS, KC_PGDN, + KC_LSFT, KC_NUBS, KC_Z, KC_X, KC_C, KC_V, KC_B, KC_N, KC_M, KC_COMM, KC_DOT, KC_SLSH, KC_RSFT, KC_P1, KC_P2, KC_P3, KC_PENT, KC_HOME, KC_UP, KC_END, + KC_LCTL, KC_LWIN, KC_LALT, KC_SPC, KC_RALT, KC_RWIN, LT(_FN,KC_APP), KC_RCTL, KC_P0, KC_PDOT, KC_LEFT, KC_DOWN, KC_RGHT + ), + [_FN] = LAYOUT( + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, KC_SYSREQ, _______, _______, _______, + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, KC_MSTP, KC_VOLU, _______, _______, + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, KC_MPRV, KC_MPLY, KC_MNXT, _______, KC_MUTE, _______, + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, KC_MUTE, KC_VOLD, _______, _______, KC_VOLD, KC_MSTP, KC_VOLU, + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, KC_MPRV, KC_MPLY, KC_MNXT + ) +}; + +void led_set_user(uint8_t usb_led) { + + if (IS_LED_ON(usb_led, USB_LED_CAPS_LOCK)) { + writePinHigh(F1); + } else { + writePinLow(F1); + } + + if (IS_LED_ON(usb_led, USB_LED_SCROLL_LOCK)) { + writePinHigh(F0); + } else { + writePinLow(F0); + } + + if (!(IS_LED_ON(usb_led, USB_LED_NUM_LOCK))) { + tap_code(KC_NUMLOCK); + } +} +bool process_record_user(uint16_t keycode, keyrecord_t *record) { + static bool sysreq_led = false; + if (record->event.pressed) { + if (sysreq_led) { + sysreq_led = false; + writePinLow(F4); + } + else { + switch(keycode) { + case KC_SYSREQ: + sysreq_led = true; + writePinHigh(F4); + } + } + } + return true; +} diff --git a/keyboards/handwired/jopr/keymaps/modded_white/keymap.c b/keyboards/handwired/jopr/keymaps/modded_white/keymap.c new file mode 100644 index 0000000000..da1f9e1838 --- /dev/null +++ b/keyboards/handwired/jopr/keymaps/modded_white/keymap.c @@ -0,0 +1,59 @@ +#include QMK_KEYBOARD_H + +#define _BL 0 +#define _FN 1 +const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { + + [_BL] = LAYOUT( + KC_ESC, KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_F11, KC_F12, KC_DEL, KC_NO, KC_CAPS, KC_SLCK, KC_PAUS, + KC_NUHS, KC_1, KC_2, KC_3, KC_4, KC_5, KC_6, KC_7, KC_8, KC_9, KC_0, KC_NUBS, KC_SLSH, KC_BSPC, KC_PSCR, KC_PSLS, KC_PAST, KC_PMNS, + KC_TAB, KC_V, KC_Y, KC_D, KC_COMM, KC_QUOT, KC_INT1, KC_J, KC_M, KC_L, KC_U, KC_LBRC, KC_RBRC, KC_ENT, KC_P7, KC_P8, KC_P9, KC_PPLS, + KC_MHEN, KC_A, KC_T, KC_H, KC_E, KC_B, KC_MINS, KC_C, KC_S, KC_N, KC_O, KC_I, KC_EQL, KC_P4, KC_P5, KC_P6, KC_PGUP, KC_INS, KC_PGDN, + KC_LSFT, KC_GRV, KC_P, KC_K, KC_G, KC_W, KC_Q, KC_X, KC_R, KC_F, KC_DOT, KC_Z, KC_RSFT, KC_P1, KC_P2, KC_P3, KC_PENT, KC_HOME, KC_UP, KC_END, + KC_LCTL, KC_LWIN, KC_LALT, KC_SPC, KC_RALT, KC_RWIN, LT(_FN,KC_APP), KC_RCTL, KC_P0, KC_PDOT, KC_LEFT, KC_DOWN, KC_RGHT + ), + [_FN] = LAYOUT( + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, KC_SYSREQ, _______, _______, _______, + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, KC_MSTP, KC_VOLU, _______, _______, + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, KC_MPRV, KC_MPLY, KC_MNXT, _______, KC_MUTE, _______, + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, KC_MUTE, KC_VOLD, _______, _______, KC_VOLD, KC_MSTP, KC_VOLU, + _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, KC_MPRV, KC_MPLY, KC_MNXT + ) +}; + +void led_set_user(uint8_t usb_led) { + + if (IS_LED_ON(usb_led, USB_LED_CAPS_LOCK)) { + writePinHigh(F1); + } else { + writePinLow(F1); + } + + if (IS_LED_ON(usb_led, USB_LED_SCROLL_LOCK)) { + writePinHigh(F0); + } else { + writePinLow(F0); + } + + if (!(IS_LED_ON(usb_led, USB_LED_NUM_LOCK))) { + tap_code(KC_NUMLOCK); + } +} +bool process_record_user(uint16_t keycode, keyrecord_t *record) { + static bool sysreq_led = false; + if (record->event.pressed) { + if (sysreq_led) { + sysreq_led = false; + writePinLow(F4); + } + else { + switch(keycode) { + case KC_SYSREQ: + sysreq_led = true; + writePinHigh(F4); + } + } + } + return true; +}
\ No newline at end of file diff --git a/keyboards/handwired/jopr/readme.md b/keyboards/handwired/jopr/readme.md new file mode 100644 index 0000000000..eab197d2de --- /dev/null +++ b/keyboards/handwired/jopr/readme.md @@ -0,0 +1,17 @@ +# jopr-106-Nl2SR-Cl2MH + +106-key based on ISO 105-key, NumLock to SysReq, CapsLock to Muhenkan/ROYA, NumLock state forced on + +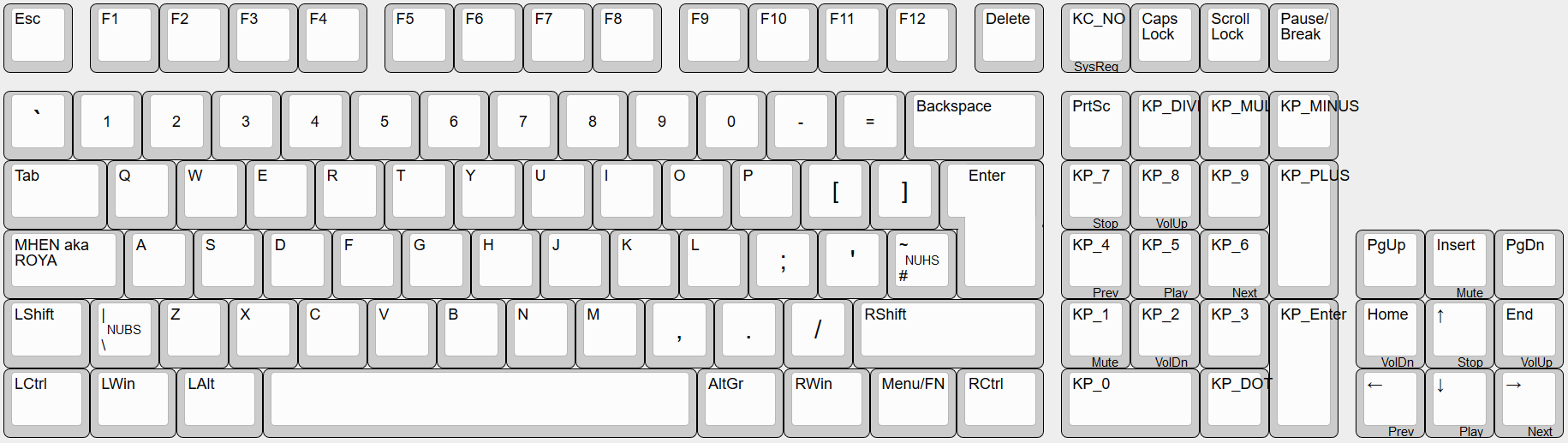 + + +Inspired by [KeyBored](https://github.com/itractus/KeyBored) and [white_keyboard_layout](https://github.com/mw8/white_keyboard_layout) + +Keyboard Maintainer: [joelproko](https://github.com/joelproko) +Hardware: https://github.com/joelproko/keyboard_layout_jopr + +Make example for this keyboard (after setting up your build environment): + + make jopr:default + +See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs). diff --git a/keyboards/handwired/jopr/rules.mk b/keyboards/handwired/jopr/rules.mk new file mode 100644 index 0000000000..de83252c38 --- /dev/null +++ b/keyboards/handwired/jopr/rules.mk @@ -0,0 +1,63 @@ +# MCU name +MCU = atmega32u4 + +# Processor frequency. +# This will define a symbol, F_CPU, in all source code files equal to the +# processor frequency in Hz. You can then use this symbol in your source code to +# calculate timings. Do NOT tack on a 'UL' at the end, this will be done +# automatically to create a 32-bit value in your source code. +# +# This will be an integer division of F_USB below, as it is sourced by +# F_USB after it has run through any CPU prescalers. Note that this value +# does not *change* the processor frequency - it should merely be updated to +# reflect the processor speed set externally so that the code can use accurate +# software delays. +F_CPU = 16000000 + +# +# LUFA specific +# +# Target architecture (see library "Board Types" documentation). +ARCH = AVR8 + +# Input clock frequency. +# This will define a symbol, F_USB, in all source code files equal to the +# input clock frequency (before any prescaling is performed) in Hz. This value may +# differ from F_CPU if prescaling is used on the latter, and is required as the +# raw input clock is fed directly to the PLL sections of the AVR for high speed +# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL' +# at the end, this will be done automatically to create a 32-bit value in your +# source code. +# +# If no clock division is performed on the input clock inside the AVR (via the +# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU. +F_USB = $(F_CPU) + +# Interrupt driven control endpoint task(+60) +OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT + + +# Bootloader selection +# Teensy halfkay +# Pro Micro caterina +# Atmel DFU atmel-dfu +# LUFA DFU lufa-dfu +# QMK DFU qmk-dfu +# atmega32a bootloadHID +BOOTLOADER = atmel-dfu + + +# Build Options +# comment out to disable the options. +# +BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration(+1000) +MOUSEKEY_ENABLE = no # Mouse keys(+4700) +EXTRAKEY_ENABLE = yes # Audio control and System control(+450) +CONSOLE_ENABLE = no # Console for debug(+400) +COMMAND_ENABLE = no # Commands for debug and configuration +SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend +NKRO_ENABLE = yes # USB Nkey Rollover - if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work +BACKLIGHT_ENABLE = no # Enable keyboard backlight functionality +AUDIO_ENABLE = no +UNICODE_ENABLE = yes +RGBLIGHT_ENABLE = no diff --git a/keyboards/handwired/onekey/bluepill/boards/GENERIC_STM32_F103/board.c b/keyboards/handwired/onekey/bluepill/boards/GENERIC_STM32_F103/board.c new file mode 100644 index 0000000000..8c5a87f35f --- /dev/null +++ b/keyboards/handwired/onekey/bluepill/boards/GENERIC_STM32_F103/board.c @@ -0,0 +1,56 @@ +/* + ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +#include "hal.h" + +// Value to place in RTC backup register 10 for persistent bootloader mode +#define RTC_BOOTLOADER_FLAG 0x424C + +/** + * @brief PAL setup. + * @details Digital I/O ports static configuration as defined in @p board.h. + * This variable is used by the HAL when initializing the PAL driver. + */ +#if HAL_USE_PAL || defined(__DOXYGEN__) +const PALConfig pal_default_config = +{ + {VAL_GPIOAODR, VAL_GPIOACRL, VAL_GPIOACRH}, + {VAL_GPIOBODR, VAL_GPIOBCRL, VAL_GPIOBCRH}, + {VAL_GPIOCODR, VAL_GPIOCCRL, VAL_GPIOCCRH}, + {VAL_GPIODODR, VAL_GPIODCRL, VAL_GPIODCRH}, + {VAL_GPIOEODR, VAL_GPIOECRL, VAL_GPIOECRH}, +}; +#endif + +/* + * Early initialization code. + * This initialization must be performed just after stack setup and before + * any other initialization. + */ +void __early_init(void) { + + stm32_clock_init(); +} + +/* + * Board-specific initialization code. + */ +void boardInit(void) { + //JTAG-DP Disabled and SW-DP Enabled + AFIO->MAPR |= AFIO_MAPR_SWJ_CFG_JTAGDISABLE; + //Set backup register DR10 to enter bootloader on reset + BKP->DR10 = RTC_BOOTLOADER_FLAG; +} diff --git a/keyboards/handwired/onekey/bluepill/boards/GENERIC_STM32_F103/board.h b/keyboards/handwired/onekey/bluepill/boards/GENERIC_STM32_F103/board.h new file mode 100644 index 0000000000..9427adabf1 --- /dev/null +++ b/keyboards/handwired/onekey/bluepill/boards/GENERIC_STM32_F103/board.h @@ -0,0 +1,166 @@ +/* + ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +#ifndef _BOARD_H_ +#define _BOARD_H_ + +/* + * Setup for a Generic STM32F103 board. + */ + +/* + * Board identifier. + */ +#define BOARD_GENERIC_STM32_F103 +#define BOARD_NAME "Generic STM32F103x board" + +/* + * Board frequencies. + */ +#define STM32_LSECLK 32768 +#define STM32_HSECLK 8000000 + +/* + * MCU type, supported types are defined in ./os/hal/platforms/hal_lld.h. + */ +#define STM32F103xB + +/* + * IO pins assignments + */ + +/* on-board */ + +#define GPIOA_LED 8 +#define GPIOD_OSC_IN 0 +#define GPIOD_OSC_OUT 1 + +/* In case your board has a "USB enable" hardware + controlled by a pin, define it here. (It could be just + a 1.5k resistor connected to D+ line.) +*/ +/* +#define GPIOB_USB_DISC 10 +*/ + +/* + * I/O ports initial setup, this configuration is established soon after reset + * in the initialization code. + * + * The digits have the following meaning: + * 0 - Analog input. + * 1 - Push Pull output 10MHz. + * 2 - Push Pull output 2MHz. + * 3 - Push Pull output 50MHz. + * 4 - Digital input. + * 5 - Open Drain output 10MHz. + * 6 - Open Drain output 2MHz. + * 7 - Open Drain output 50MHz. + * 8 - Digital input with PullUp or PullDown resistor depending on ODR. + * 9 - Alternate Push Pull output 10MHz. + * A - Alternate Push Pull output 2MHz. + * B - Alternate Push Pull output 50MHz. + * C - Reserved. + * D - Alternate Open Drain output 10MHz. + * E - Alternate Open Drain output 2MHz. + * F - Alternate Open Drain output 50MHz. + * Please refer to the STM32 Reference Manual for details. + */ + +/* + * Port A setup. + * Everything input with pull-up except: + * PA2 - Alternate output (USART2 TX). + * PA3 - Normal input (USART2 RX). + * PA9 - Alternate output (USART1 TX). + * PA10 - Normal input (USART1 RX). + */ +#define VAL_GPIOACRL 0x88884B88 /* PA7...PA0 */ +#define VAL_GPIOACRH 0x888884B8 /* PA15...PA8 */ +#define VAL_GPIOAODR 0xFFFFFFFF + +/* + * Port B setup. + * Everything input with pull-up except: + * PB10 - Push Pull output (USB switch). + */ +#define VAL_GPIOBCRL 0x88888888 /* PB7...PB0 */ +#define VAL_GPIOBCRH 0x88888388 /* PB15...PB8 */ +#define VAL_GPIOBODR 0xFFFFFFFF + +/* + * Port C setup. + * Everything input with pull-up except: + * PC13 - Push Pull output (LED). + */ +#define VAL_GPIOCCRL 0x88888888 /* PC7...PC0 */ +#define VAL_GPIOCCRH 0x88388888 /* PC15...PC8 */ +#define VAL_GPIOCODR 0xFFFFFFFF + +/* + * Port D setup. + * Everything input with pull-up except: + * PD0 - Normal input (XTAL). + * PD1 - Normal input (XTAL). + */ +#define VAL_GPIODCRL 0x88888844 /* PD7...PD0 */ +#define VAL_GPIODCRH 0x88888888 /* PD15...PD8 */ +#define VAL_GPIODODR 0xFFFFFFFF + +/* + * Port E setup. + * Everything input with pull-up except: + */ +#define VAL_GPIOECRL 0x88888888 /* PE7...PE0 */ +#define VAL_GPIOECRH 0x88888888 /* PE15...PE8 */ +#define VAL_GPIOEODR 0xFFFFFFFF + +/* + * USB bus activation macro, required by the USB driver. + */ +/* The point is that most of the generic STM32F103* boards + have a 1.5k resistor connected on one end to the D+ line + and on the other end to some pin. Or even a slightly more + complicated "USB enable" circuit, controlled by a pin. + That should go here. + + However on some boards (e.g. one that I have), there's no + such hardware. In which case it's better to not do anything. +*/ +/* +#define usb_lld_connect_bus(usbp) palClearPad(GPIOB, GPIOB_USB_DISC) +*/ +#define usb_lld_connect_bus(usbp) palSetPadMode(GPIOA, 12, PAL_MODE_INPUT); + +/* + * USB bus de-activation macro, required by the USB driver. + */ +/* +#define usb_lld_disconnect_bus(usbp) palSetPad(GPIOB, GPIOB_USB_DISC) +*/ +#define usb_lld_disconnect_bus(usbp) palSetPadMode(GPIOA, 12, PAL_MODE_OUTPUT_PUSHPULL); palClearPad(GPIOA, 12); + +#if !defined(_FROM_ASM_) +#ifdef __cplusplus +extern "C" { +#endif + void boardInit(void); +#ifdef __cplusplus +} +#endif +#endif /* _FROM_ASM_ */ + +#endif /* _BOARD_H_ */ diff --git a/keyboards/handwired/onekey/bluepill/boards/GENERIC_STM32_F103/board.mk b/keyboards/handwired/onekey/bluepill/boards/GENERIC_STM32_F103/board.mk new file mode 100644 index 0000000000..6b8b312fd9 --- /dev/null +++ b/keyboards/handwired/onekey/bluepill/boards/GENERIC_STM32_F103/board.mk @@ -0,0 +1,5 @@ +# List of all the board related files. +BOARDSRC = $(BOARD_PATH)/boards/GENERIC_STM32_F103/board.c + +# Required include directories +BOARDINC = $(BOARD_PATH)/boards/GENERIC_STM32_F103 diff --git a/keyboards/handwired/onekey/bluepill/bootloader_defs.h b/keyboards/handwired/onekey/bluepill/bootloader_defs.h new file mode 100644 index 0000000000..6b8fa9f727 --- /dev/null +++ b/keyboards/handwired/onekey/bluepill/bootloader_defs.h @@ -0,0 +1,10 @@ +/* Address for jumping to bootloader on STM32 chips. */ +/* It is chip dependent, the correct number can be looked up here (page 175): + * http://www.st.com/web/en/resource/technical/document/application_note/CD00167594.pdf + * This also requires a patch to chibios: + * <tmk_dir>/tmk_core/tool/chibios/ch-bootloader-jump.patch + */ + +// STM32F103* does NOT have an USB bootloader in ROM (only serial), +// so setting anything here does not make much sense +#define STM32_BOOTLOADER_ADDRESS 0x80000000 diff --git a/keyboards/handwired/onekey/bluepill/chconf.h b/keyboards/handwired/onekey/bluepill/chconf.h new file mode 100644 index 0000000000..bbd9b2da62 --- /dev/null +++ b/keyboards/handwired/onekey/bluepill/chconf.h @@ -0,0 +1,524 @@ +/* + ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +/** + * @file templates/chconf.h + * @brief Configuration file template. + * @details A copy of this file must be placed in each project directory, it + * contains the application specific kernel settings. + * + * @addtogroup config + * @details Kernel related settings and hooks. + * @{ + */ + +#ifndef CHCONF_H +#define CHCONF_H + +#define _CHIBIOS_RT_CONF_ + +/*===========================================================================*/ +/** + * @name System timers settings + * @{ + */ +/*===========================================================================*/ + +/** + * @brief System time counter resolution. + * @note Allowed values are 16 or 32 bits. + */ +#define CH_CFG_ST_RESOLUTION 32 + +/** + * @brief System tick frequency. + * @details Frequency of the system timer that drives the system ticks. This + * setting also defines the system tick time unit. + */ +#define CH_CFG_ST_FREQUENCY 100000 + +/** + * @brief Time delta constant for the tick-less mode. + * @note If this value is zero then the system uses the classic + * periodic tick. This value represents the minimum number + * of ticks that is safe to specify in a timeout directive. + * The value one is not valid, timeouts are rounded up to + * this value. + */ +#define CH_CFG_ST_TIMEDELTA 0 + +/** @} */ + +/*===========================================================================*/ +/** + * @name Kernel parameters and options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Round robin interval. + * @details This constant is the number of system ticks allowed for the + * threads before preemption occurs. Setting this value to zero + * disables the preemption for threads with equal priority and the + * round robin becomes cooperative. Note that higher priority + * threads can still preempt, the kernel is always preemptive. + * @note Disabling the round robin preemption makes the kernel more compact + * and generally faster. + * @note The round robin preemption is not supported in tickless mode and + * must be set to zero in that case. + */ +#define CH_CFG_TIME_QUANTUM 0 + +/** + * @brief Managed RAM size. + * @details Size of the RAM area to be managed by the OS. If set to zero + * then the whole available RAM is used. The core memory is made + * available to the heap allocator and/or can be used directly through + * the simplified core memory allocator. + * + * @note In order to let the OS manage the whole RAM the linker script must + * provide the @p __heap_base__ and @p __heap_end__ symbols. + * @note Requires @p CH_CFG_USE_MEMCORE. + */ +#define CH_CFG_MEMCORE_SIZE 0 + +/** + * @brief Idle thread automatic spawn suppression. + * @details When this option is activated the function @p chSysInit() + * does not spawn the idle thread. The application @p main() + * function becomes the idle thread and must implement an + * infinite loop. + */ +#define CH_CFG_NO_IDLE_THREAD FALSE + +/* Use __WFI in the idle thread for waiting. Does lower the power + * consumption. */ +#define CORTEX_ENABLE_WFI_IDLE TRUE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Performance options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief OS optimization. + * @details If enabled then time efficient rather than space efficient code + * is used when two possible implementations exist. + * + * @note This is not related to the compiler optimization options. + * @note The default is @p TRUE. + */ +#define CH_CFG_OPTIMIZE_SPEED TRUE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Subsystem options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Time Measurement APIs. + * @details If enabled then the time measurement APIs are included in + * the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_TM FALSE + +/** + * @brief Threads registry APIs. + * @details If enabled then the registry APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_REGISTRY TRUE + +/** + * @brief Threads synchronization APIs. + * @details If enabled then the @p chThdWait() function is included in + * the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_WAITEXIT TRUE + +/** + * @brief Semaphores APIs. + * @details If enabled then the Semaphores APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_SEMAPHORES TRUE + +/** + * @brief Semaphores queuing mode. + * @details If enabled then the threads are enqueued on semaphores by + * priority rather than in FIFO order. + * + * @note The default is @p FALSE. Enable this if you have special + * requirements. + * @note Requires @p CH_CFG_USE_SEMAPHORES. + */ +#define CH_CFG_USE_SEMAPHORES_PRIORITY FALSE + +/** + * @brief Mutexes APIs. + * @details If enabled then the mutexes APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MUTEXES TRUE + +/** + * @brief Enables recursive behavior on mutexes. + * @note Recursive mutexes are heavier and have an increased + * memory footprint. + * + * @note The default is @p FALSE. + * @note Requires @p CH_CFG_USE_MUTEXES. + */ +#define CH_CFG_USE_MUTEXES_RECURSIVE FALSE + +/** + * @brief Conditional Variables APIs. + * @details If enabled then the conditional variables APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_MUTEXES. + */ +#define CH_CFG_USE_CONDVARS TRUE + +/** + * @brief Conditional Variables APIs with timeout. + * @details If enabled then the conditional variables APIs with timeout + * specification are included in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_CONDVARS. + */ +#define CH_CFG_USE_CONDVARS_TIMEOUT FALSE + +/** + * @brief Events Flags APIs. + * @details If enabled then the event flags APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_EVENTS TRUE + +/** + * @brief Events Flags APIs with timeout. + * @details If enabled then the events APIs with timeout specification + * are included in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_EVENTS. + */ +#define CH_CFG_USE_EVENTS_TIMEOUT TRUE + +/** + * @brief Synchronous Messages APIs. + * @details If enabled then the synchronous messages APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MESSAGES TRUE + +/** + * @brief Synchronous Messages queuing mode. + * @details If enabled then messages are served by priority rather than in + * FIFO order. + * + * @note The default is @p FALSE. Enable this if you have special + * requirements. + * @note Requires @p CH_CFG_USE_MESSAGES. + */ +#define CH_CFG_USE_MESSAGES_PRIORITY FALSE + +/** + * @brief Mailboxes APIs. + * @details If enabled then the asynchronous messages (mailboxes) APIs are + * included in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_SEMAPHORES. + */ +#define CH_CFG_USE_MAILBOXES TRUE + +/** + * @brief Core Memory Manager APIs. + * @details If enabled then the core memory manager APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MEMCORE TRUE + +/** + * @brief Heap Allocator APIs. + * @details If enabled then the memory heap allocator APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_MEMCORE and either @p CH_CFG_USE_MUTEXES or + * @p CH_CFG_USE_SEMAPHORES. + * @note Mutexes are recommended. + */ +#define CH_CFG_USE_HEAP TRUE + +/** + * @brief Memory Pools Allocator APIs. + * @details If enabled then the memory pools allocator APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MEMPOOLS FALSE + +/** + * @brief Dynamic Threads APIs. + * @details If enabled then the dynamic threads creation APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_WAITEXIT. + * @note Requires @p CH_CFG_USE_HEAP and/or @p CH_CFG_USE_MEMPOOLS. + */ +#define CH_CFG_USE_DYNAMIC FALSE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Debug options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Debug option, kernel statistics. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_STATISTICS FALSE + +/** + * @brief Debug option, system state check. + * @details If enabled the correct call protocol for system APIs is checked + * at runtime. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_SYSTEM_STATE_CHECK FALSE + +/** + * @brief Debug option, parameters checks. + * @details If enabled then the checks on the API functions input + * parameters are activated. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_ENABLE_CHECKS FALSE + +/** + * @brief Debug option, consistency checks. + * @details If enabled then all the assertions in the kernel code are + * activated. This includes consistency checks inside the kernel, + * runtime anomalies and port-defined checks. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_ENABLE_ASSERTS FALSE + +/** + * @brief Debug option, trace buffer. + * @details If enabled then the trace buffer is activated. + * + * @note The default is @p CH_DBG_TRACE_MASK_DISABLED. + */ +#define CH_DBG_TRACE_MASK CH_DBG_TRACE_MASK_DISABLED + +/** + * @brief Trace buffer entries. + * @note The trace buffer is only allocated if @p CH_DBG_TRACE_MASK is + * different from @p CH_DBG_TRACE_MASK_DISABLED. + */ +#define CH_DBG_TRACE_BUFFER_SIZE 128 + +/** + * @brief Debug option, stack checks. + * @details If enabled then a runtime stack check is performed. + * + * @note The default is @p FALSE. + * @note The stack check is performed in a architecture/port dependent way. + * It may not be implemented or some ports. + * @note The default failure mode is to halt the system with the global + * @p panic_msg variable set to @p NULL. + */ +#define CH_DBG_ENABLE_STACK_CHECK FALSE + +/** + * @brief Debug option, stacks initialization. + * @details If enabled then the threads working area is filled with a byte + * value when a thread is created. This can be useful for the + * runtime measurement of the used stack. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_FILL_THREADS FALSE + +/** + * @brief Debug option, threads profiling. + * @details If enabled then a field is added to the @p thread_t structure that + * counts the system ticks occurred while executing the thread. + * + * @note The default is @p FALSE. + * @note This debug option is not currently compatible with the + * tickless mode. + */ +#define CH_DBG_THREADS_PROFILING FALSE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Kernel hooks + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Threads descriptor structure extension. + * @details User fields added to the end of the @p thread_t structure. + */ +#define CH_CFG_THREAD_EXTRA_FIELDS \ + /* Add threads custom fields here.*/ + +/** + * @brief Threads initialization hook. + * @details User initialization code added to the @p chThdInit() API. + * + * @note It is invoked from within @p chThdInit() and implicitly from all + * the threads creation APIs. + */ +#define CH_CFG_THREAD_INIT_HOOK(tp) { \ + /* Add threads initialization code here.*/ \ +} + +/** + * @brief Threads finalization hook. + * @details User finalization code added to the @p chThdExit() API. + */ +#define CH_CFG_THREAD_EXIT_HOOK(tp) { \ + /* Add threads finalization code here.*/ \ +} + +/** + * @brief Context switch hook. + * @details This hook is invoked just before switching between threads. + */ +#define CH_CFG_CONTEXT_SWITCH_HOOK(ntp, otp) { \ + /* Context switch code here.*/ \ +} + +/** + * @brief ISR enter hook. + */ +#define CH_CFG_IRQ_PROLOGUE_HOOK() { \ + /* IRQ prologue code here.*/ \ +} + +/** + * @brief ISR exit hook. + */ +#define CH_CFG_IRQ_EPILOGUE_HOOK() { \ + /* IRQ epilogue code here.*/ \ +} + +/** + * @brief Idle thread enter hook. + * @note This hook is invoked within a critical zone, no OS functions + * should be invoked from here. + * @note This macro can be used to activate a power saving mode. + */ +#define CH_CFG_IDLE_ENTER_HOOK() { \ + /* Idle-enter code here.*/ \ +} + +/** + * @brief Idle thread leave hook. + * @note This hook is invoked within a critical zone, no OS functions + * should be invoked from here. + * @note This macro can be used to deactivate a power saving mode. + */ +#define CH_CFG_IDLE_LEAVE_HOOK() { \ + /* Idle-leave code here.*/ \ +} + +/** + * @brief Idle Loop hook. + * @details This hook is continuously invoked by the idle thread loop. + */ +#define CH_CFG_IDLE_LOOP_HOOK() { \ + /* Idle loop code here.*/ \ +} + +/** + * @brief System tick event hook. + * @details This hook is invoked in the system tick handler immediately + * after processing the virtual timers queue. + */ +#define CH_CFG_SYSTEM_TICK_HOOK() { \ + /* System tick event code here.*/ \ +} + +/** + * @brief System halt hook. + * @details This hook is invoked in case to a system halting error before + * the system is halted. + */ +#define CH_CFG_SYSTEM_HALT_HOOK(reason) { \ + /* System halt code here.*/ \ +} + +/** + * @brief Trace hook. + * @details This hook is invoked each time a new record is written in the + * trace buffer. + */ +#define CH_CFG_TRACE_HOOK(tep) { \ + /* Trace code here.*/ \ +} + +/** @} */ + +/*===========================================================================*/ +/* Port-specific settings (override port settings defaulted in chcore.h). */ +/*===========================================================================*/ + +#endif /* CHCONF_H */ + +/** @} */ diff --git a/keyboards/handwired/onekey/bluepill/config.h b/keyboards/handwired/onekey/bluepill/config.h new file mode 100644 index 0000000000..3d88ee00e5 --- /dev/null +++ b/keyboards/handwired/onekey/bluepill/config.h @@ -0,0 +1,23 @@ +/* Copyright 2019 + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +#include "config_common.h" + +#define MATRIX_COL_PINS { B0 } +#define MATRIX_ROW_PINS { A7 } +#define UNUSED_PINS diff --git a/keyboards/handwired/onekey/bluepill/halconf.h b/keyboards/handwired/onekey/bluepill/halconf.h new file mode 100644 index 0000000000..72879a575b --- /dev/null +++ b/keyboards/handwired/onekey/bluepill/halconf.h @@ -0,0 +1,353 @@ +/* + ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +/** + * @file templates/halconf.h + * @brief HAL configuration header. + * @details HAL configuration file, this file allows to enable or disable the + * various device drivers from your application. You may also use + * this file in order to override the device drivers default settings. + * + * @addtogroup HAL_CONF + * @{ + */ + +#ifndef _HALCONF_H_ +#define _HALCONF_H_ + +#include "mcuconf.h" + +/** + * @brief Enables the PAL subsystem. + */ +#if !defined(HAL_USE_PAL) || defined(__DOXYGEN__) +#define HAL_USE_PAL TRUE +#endif + +/** + * @brief Enables the ADC subsystem. + */ +#if !defined(HAL_USE_ADC) || defined(__DOXYGEN__) +#define HAL_USE_ADC FALSE +#endif + +/** + * @brief Enables the CAN subsystem. + */ +#if !defined(HAL_USE_CAN) || defined(__DOXYGEN__) +#define HAL_USE_CAN FALSE +#endif + +/** + * @brief Enables the DAC subsystem. + */ +#if !defined(HAL_USE_DAC) || defined(__DOXYGEN__) +#define HAL_USE_DAC FALSE +#endif + +/** + * @brief Enables the EXT subsystem. + */ +#if !defined(HAL_USE_EXT) || defined(__DOXYGEN__) +#define HAL_USE_EXT FALSE +#endif + +/** + * @brief Enables the GPT subsystem. + */ +#if !defined(HAL_USE_GPT) || defined(__DOXYGEN__) +#define HAL_USE_GPT FALSE +#endif + +/** + * @brief Enables the I2C subsystem. + */ +#if !defined(HAL_USE_I2C) || defined(__DOXYGEN__) +#define HAL_USE_I2C FALSE +#endif + +/** + * @brief Enables the I2S subsystem. + */ +#if !defined(HAL_USE_I2S) || defined(__DOXYGEN__) +#define HAL_USE_I2S FALSE +#endif + +/** + * @brief Enables the ICU subsystem. + */ +#if !defined(HAL_USE_ICU) || defined(__DOXYGEN__) +#define HAL_USE_ICU FALSE +#endif + +/** + * @brief Enables the MAC subsystem. + */ +#if !defined(HAL_USE_MAC) || defined(__DOXYGEN__) +#define HAL_USE_MAC FALSE +#endif + +/** + * @brief Enables the MMC_SPI subsystem. + */ +#if !defined(HAL_USE_MMC_SPI) || defined(__DOXYGEN__) +#define HAL_USE_MMC_SPI FALSE +#endif + +/** + * @brief Enables the PWM subsystem. + */ +#if !defined(HAL_USE_PWM) || defined(__DOXYGEN__) +#define HAL_USE_PWM TRUE +#endif + +/** + * @brief Enables the RTC subsystem. + */ +#if !defined(HAL_USE_RTC) || defined(__DOXYGEN__) +#define HAL_USE_RTC FALSE +#endif + +/** + * @brief Enables the SDC subsystem. + */ +#if !defined(HAL_USE_SDC) || defined(__DOXYGEN__) +#define HAL_USE_SDC FALSE +#endif + +/** + * @brief Enables the SERIAL subsystem. + */ +#if !defined(HAL_USE_SERIAL) || defined(__DOXYGEN__) +#define HAL_USE_SERIAL FALSE +#endif + +/** + * @brief Enables the SERIAL over USB subsystem. + */ +#if !defined(HAL_USE_SERIAL_USB) || defined(__DOXYGEN__) +#define HAL_USE_SERIAL_USB FALSE +#endif + +/** + * @brief Enables the SPI subsystem. + */ +#if !defined(HAL_USE_SPI) || defined(__DOXYGEN__) +#define HAL_USE_SPI TRUE +#endif + +/** + * @brief Enables the UART subsystem. + */ +#if !defined(HAL_USE_UART) || defined(__DOXYGEN__) +#define HAL_USE_UART FALSE +#endif + +/** + * @brief Enables the USB subsystem. + */ +#if !defined(HAL_USE_USB) || defined(__DOXYGEN__) +#define HAL_USE_USB TRUE +#endif + +/** + * @brief Enables the WDG subsystem. + */ +#if !defined(HAL_USE_WDG) || defined(__DOXYGEN__) +#define HAL_USE_WDG FALSE +#endif + +/*===========================================================================*/ +/* ADC driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables synchronous APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(ADC_USE_WAIT) || defined(__DOXYGEN__) +#define ADC_USE_WAIT TRUE +#endif + +/** + * @brief Enables the @p adcAcquireBus() and @p adcReleaseBus() APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(ADC_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) +#define ADC_USE_MUTUAL_EXCLUSION TRUE +#endif + +/*===========================================================================*/ +/* CAN driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Sleep mode related APIs inclusion switch. + */ +#if !defined(CAN_USE_SLEEP_MODE) || defined(__DOXYGEN__) +#define CAN_USE_SLEEP_MODE TRUE +#endif + +/*===========================================================================*/ +/* I2C driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables the mutual exclusion APIs on the I2C bus. + */ +#if !defined(I2C_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) +#define I2C_USE_MUTUAL_EXCLUSION TRUE +#endif + +/*===========================================================================*/ +/* MAC driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables an event sources for incoming packets. + */ +#if !defined(MAC_USE_ZERO_COPY) || defined(__DOXYGEN__) +#define MAC_USE_ZERO_COPY FALSE +#endif + +/** + * @brief Enables an event sources for incoming packets. + */ +#if !defined(MAC_USE_EVENTS) || defined(__DOXYGEN__) +#define MAC_USE_EVENTS TRUE +#endif + +/*===========================================================================*/ +/* MMC_SPI driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Delays insertions. + * @details If enabled this options inserts delays into the MMC waiting + * routines releasing some extra CPU time for the threads with + * lower priority, this may slow down the driver a bit however. + * This option is recommended also if the SPI driver does not + * use a DMA channel and heavily loads the CPU. + */ +#if !defined(MMC_NICE_WAITING) || defined(__DOXYGEN__) +#define MMC_NICE_WAITING TRUE +#endif + +/*===========================================================================*/ +/* SDC driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Number of initialization attempts before rejecting the card. + * @note Attempts are performed at 10mS intervals. + */ +#if !defined(SDC_INIT_RETRY) || defined(__DOXYGEN__) +#define SDC_INIT_RETRY 100 +#endif + +/** + * @brief Include support for MMC cards. + * @note MMC support is not yet implemented so this option must be kept + * at @p FALSE. + */ +#if !defined(SDC_MMC_SUPPORT) || defined(__DOXYGEN__) +#define SDC_MMC_SUPPORT FALSE +#endif + +/** + * @brief Delays insertions. + * @details If enabled this options inserts delays into the MMC waiting + * routines releasing some extra CPU time for the threads with + * lower priority, this may slow down the driver a bit however. + */ +#if !defined(SDC_NICE_WAITING) || defined(__DOXYGEN__) +#define SDC_NICE_WAITING TRUE +#endif + +/*===========================================================================*/ +/* SERIAL driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Default bit rate. + * @details Configuration parameter, this is the baud rate selected for the + * default configuration. + */ +#if !defined(SERIAL_DEFAULT_BITRATE) || defined(__DOXYGEN__) +#define SERIAL_DEFAULT_BITRATE 38400 +#endif + +/** + * @brief Serial buffers size. + * @details Configuration parameter, you can change the depth of the queue + * buffers depending on the requirements of your application. + * @note The default is 64 bytes for both the transmission and receive + * buffers. + */ +#if !defined(SERIAL_BUFFERS_SIZE) || defined(__DOXYGEN__) +#define SERIAL_BUFFERS_SIZE 16 +#endif + +/*===========================================================================*/ +/* SERIAL_USB driver related setting. */ +/*===========================================================================*/ + +/** + * @brief Serial over USB buffers size. + * @details Configuration parameter, the buffer size must be a multiple of + * the USB data endpoint maximum packet size. + * @note The default is 64 bytes for both the transmission and receive + * buffers. + */ +#if !defined(SERIAL_USB_BUFFERS_SIZE) || defined(__DOXYGEN__) +#define SERIAL_USB_BUFFERS_SIZE 1 +#endif + +/*===========================================================================*/ +/* SPI driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables synchronous APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(SPI_USE_WAIT) || defined(__DOXYGEN__) +#define SPI_USE_WAIT TRUE +#endif + +/** + * @brief Enables the @p spiAcquireBus() and @p spiReleaseBus() APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(SPI_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) +#define SPI_USE_MUTUAL_EXCLUSION TRUE +#endif + +/*===========================================================================*/ +/* USB driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables synchronous APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(USB_USE_WAIT) || defined(__DOXYGEN__) +#define USB_USE_WAIT TRUE +#endif + +#endif /* _HALCONF_H_ */ + +/** @} */ diff --git a/keyboards/handwired/onekey/bluepill/ld/STM32F103x8_stm32duino_bootloader.ld b/keyboards/handwired/onekey/bluepill/ld/STM32F103x8_stm32duino_bootloader.ld new file mode 100644 index 0000000000..d0688ef601 --- /dev/null +++ b/keyboards/handwired/onekey/bluepill/ld/STM32F103x8_stm32duino_bootloader.ld @@ -0,0 +1,88 @@ +/* + ChibiOS - Copyright (C) 2006..2016 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +/* + * ST32F103xB memory setup for use with the maplemini bootloader. + * You will have to + * #define CORTEX_VTOR_INIT 0x5000 + * in your projects chconf.h + */ +MEMORY +{ + flash0 : org = 0x08002000, len = 64k - 0x2000 + flash1 : org = 0x00000000, len = 0 + flash2 : org = 0x00000000, len = 0 + flash3 : org = 0x00000000, len = 0 + flash4 : org = 0x00000000, len = 0 + flash5 : org = 0x00000000, len = 0 + flash6 : org = 0x00000000, len = 0 + flash7 : org = 0x00000000, len = 0 + ram0 : org = 0x20000000, len = 20k + ram1 : org = 0x00000000, len = 0 + ram2 : org = 0x00000000, len = 0 + ram3 : org = 0x00000000, len = 0 + ram4 : org = 0x00000000, len = 0 + ram5 : org = 0x00000000, len = 0 + ram6 : org = 0x00000000, len = 0 + ram7 : org = 0x00000000, len = 0 +} + +/* For each data/text section two region are defined, a virtual region + and a load region (_LMA suffix).*/ + +/* Flash region to be used for exception vectors.*/ +REGION_ALIAS("VECTORS_FLASH", flash0); +REGION_ALIAS("VECTORS_FLASH_LMA", flash0); + +/* Flash region to be used for constructors and destructors.*/ +REGION_ALIAS("XTORS_FLASH", flash0); +REGION_ALIAS("XTORS_FLASH_LMA", flash0); + +/* Flash region to be used for code text.*/ +REGION_ALIAS("TEXT_FLASH", flash0); +REGION_ALIAS("TEXT_FLASH_LMA", flash0); + +/* Flash region to be used for read only data.*/ +REGION_ALIAS("RODATA_FLASH", flash0); +REGION_ALIAS("RODATA_FLASH_LMA", flash0); + +/* Flash region to be used for various.*/ +REGION_ALIAS("VARIOUS_FLASH", flash0); +REGION_ALIAS("VARIOUS_FLASH_LMA", flash0); + +/* Flash region to be used for RAM(n) initialization data.*/ +REGION_ALIAS("RAM_INIT_FLASH_LMA", flash0); + +/* RAM region to be used for Main stack. This stack accommodates the processing + of all exceptions and interrupts.*/ +REGION_ALIAS("MAIN_STACK_RAM", ram0); + +/* RAM region to be used for the process stack. This is the stack used by + the main() function.*/ +REGION_ALIAS("PROCESS_STACK_RAM", ram0); + +/* RAM region to be used for data segment.*/ +REGION_ALIAS("DATA_RAM", ram0); +REGION_ALIAS("DATA_RAM_LMA", flash0); + +/* RAM region to be used for BSS segment.*/ +REGION_ALIAS("BSS_RAM", ram0); + +/* RAM region to be used for the default heap.*/ +REGION_ALIAS("HEAP_RAM", ram0); + +/* Generic rules inclusion.*/ +INCLUDE rules.ld diff --git a/keyboards/handwired/onekey/bluepill/mcuconf.h b/keyboards/handwired/onekey/bluepill/mcuconf.h new file mode 100644 index 0000000000..fced27289e --- /dev/null +++ b/keyboards/handwired/onekey/bluepill/mcuconf.h @@ -0,0 +1,209 @@ +/* + ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +#ifndef _MCUCONF_H_ +#define _MCUCONF_H_ + +#define STM32F103_MCUCONF + +/* + * STM32F103 drivers configuration. + * The following settings override the default settings present in + * the various device driver implementation headers. + * Note that the settings for each driver only have effect if the whole + * driver is enabled in halconf.h. + * + * IRQ priorities: + * 15...0 Lowest...Highest. + * + * DMA priorities: + * 0...3 Lowest...Highest. + */ + +/* + * HAL driver system settings. + */ +#define STM32_NO_INIT FALSE +#define STM32_HSI_ENABLED TRUE +#define STM32_LSI_ENABLED FALSE +#define STM32_HSE_ENABLED TRUE +#define STM32_LSE_ENABLED FALSE +#define STM32_SW STM32_SW_PLL +#define STM32_PLLSRC STM32_PLLSRC_HSE +#define STM32_PLLXTPRE STM32_PLLXTPRE_DIV1 +#define STM32_PLLMUL_VALUE 9 +#define STM32_HPRE STM32_HPRE_DIV1 +#define STM32_PPRE1 STM32_PPRE1_DIV2 +#define STM32_PPRE2 STM32_PPRE2_DIV2 +#define STM32_ADCPRE STM32_ADCPRE_DIV4 +#define STM32_USB_CLOCK_REQUIRED TRUE +#define STM32_USBPRE STM32_USBPRE_DIV1P5 +#define STM32_MCOSEL STM32_MCOSEL_NOCLOCK +#define STM32_RTCSEL STM32_RTCSEL_HSEDIV +#define STM32_PVD_ENABLE FALSE +#define STM32_PLS STM32_PLS_LEV0 + +/* + * ADC driver system settings. + */ +#define STM32_ADC_USE_ADC1 FALSE +#define STM32_ADC_ADC1_DMA_PRIORITY 2 +#define STM32_ADC_ADC1_IRQ_PRIORITY 6 + +/* + * CAN driver system settings. + */ +#define STM32_CAN_USE_CAN1 FALSE +#define STM32_CAN_CAN1_IRQ_PRIORITY 11 + +/* + * EXT driver system settings. + */ +#define STM32_EXT_EXTI0_IRQ_PRIORITY 6 +#define STM32_EXT_EXTI1_IRQ_PRIORITY 6 +#define STM32_EXT_EXTI2_IRQ_PRIORITY 6 +#define STM32_EXT_EXTI3_IRQ_PRIORITY 6 +#define STM32_EXT_EXTI4_IRQ_PRIORITY 6 +#define STM32_EXT_EXTI5_9_IRQ_PRIORITY 6 +#define STM32_EXT_EXTI10_15_IRQ_PRIORITY 6 +#define STM32_EXT_EXTI16_IRQ_PRIORITY 6 +#define STM32_EXT_EXTI17_IRQ_PRIORITY 6 +#define STM32_EXT_EXTI18_IRQ_PRIORITY 6 +#define STM32_EXT_EXTI19_IRQ_PRIORITY 6 + +/* + * GPT driver system settings. + */ +#define STM32_GPT_USE_TIM1 FALSE +#define STM32_GPT_USE_TIM2 FALSE +#define STM32_GPT_USE_TIM3 FALSE +#define STM32_GPT_USE_TIM4 FALSE +#define STM32_GPT_USE_TIM5 FALSE +#define STM32_GPT_USE_TIM8 FALSE +#define STM32_GPT_TIM1_IRQ_PRIORITY 7 +#define STM32_GPT_TIM2_IRQ_PRIORITY 7 +#define STM32_GPT_TIM3_IRQ_PRIORITY 7 +#define STM32_GPT_TIM4_IRQ_PRIORITY 7 +#define STM32_GPT_TIM5_IRQ_PRIORITY 7 +#define STM32_GPT_TIM8_IRQ_PRIORITY 7 + +/* + * I2C driver system settings. + */ +#define STM32_I2C_USE_I2C1 FALSE +#define STM32_I2C_USE_I2C2 FALSE +#define STM32_I2C_BUSY_TIMEOUT 50 +#define STM32_I2C_I2C1_IRQ_PRIORITY 5 +#define STM32_I2C_I2C2_IRQ_PRIORITY 5 +#define STM32_I2C_I2C1_DMA_PRIORITY 3 +#define STM32_I2C_I2C2_DMA_PRIORITY 3 +#define STM32_I2C_DMA_ERROR_HOOK(i2cp) osalSysHalt("DMA failure") + +/* + * ICU driver system settings. + */ +#define STM32_ICU_USE_TIM1 FALSE +#define STM32_ICU_USE_TIM2 FALSE +#define STM32_ICU_USE_TIM3 FALSE +#define STM32_ICU_USE_TIM4 FALSE +#define STM32_ICU_USE_TIM5 FALSE +#define STM32_ICU_USE_TIM8 FALSE +#define STM32_ICU_TIM1_IRQ_PRIORITY 7 +#define STM32_ICU_TIM2_IRQ_PRIORITY 7 +#define STM32_ICU_TIM3_IRQ_PRIORITY 7 +#define STM32_ICU_TIM4_IRQ_PRIORITY 7 +#define STM32_ICU_TIM5_IRQ_PRIORITY 7 +#define STM32_ICU_TIM8_IRQ_PRIORITY 7 + +/* + * PWM driver system settings. + */ +#define STM32_PWM_USE_ADVANCED FALSE +#define STM32_PWM_USE_TIM1 TRUE +#define STM32_PWM_USE_TIM2 FALSE +#define STM32_PWM_USE_TIM3 FALSE +#define STM32_PWM_USE_TIM4 FALSE +#define STM32_PWM_USE_TIM5 FALSE +#define STM32_PWM_USE_TIM8 FALSE +#define STM32_PWM_TIM1_IRQ_PRIORITY 7 +#define STM32_PWM_TIM2_IRQ_PRIORITY 7 +#define STM32_PWM_TIM3_IRQ_PRIORITY 7 +#define STM32_PWM_TIM4_IRQ_PRIORITY 7 +#define STM32_PWM_TIM5_IRQ_PRIORITY 7 +#define STM32_PWM_TIM8_IRQ_PRIORITY 7 + +/* + * RTC driver system settings. + */ +#define STM32_RTC_IRQ_PRIORITY 15 + +/* + * SERIAL driver system settings. + */ +#define STM32_SERIAL_USE_USART1 FALSE +#define STM32_SERIAL_USE_USART2 FALSE +#define STM32_SERIAL_USE_USART3 FALSE +#define STM32_SERIAL_USE_UART4 FALSE +#define STM32_SERIAL_USE_UART5 FALSE +#define STM32_SERIAL_USART1_PRIORITY 12 +#define STM32_SERIAL_USART2_PRIORITY 12 +#define STM32_SERIAL_USART3_PRIORITY 12 +#define STM32_SERIAL_UART4_PRIORITY 12 +#define STM32_SERIAL_UART5_PRIORITY 12 + +/* + * SPI driver system settings. + */ +#define STM32_SPI_USE_SPI1 FALSE +#define STM32_SPI_USE_SPI2 TRUE +#define STM32_SPI_USE_SPI3 FALSE +#define STM32_SPI_SPI1_DMA_PRIORITY 1 +#define STM32_SPI_SPI2_DMA_PRIORITY 1 +#define STM32_SPI_SPI3_DMA_PRIORITY 1 +#define STM32_SPI_SPI1_IRQ_PRIORITY 10 +#define STM32_SPI_SPI2_IRQ_PRIORITY 10 +#define STM32_SPI_SPI3_IRQ_PRIORITY 10 +#define STM32_SPI_DMA_ERROR_HOOK(spip) osalSysHalt("DMA failure") + +/* + * ST driver system settings. + */ +#define STM32_ST_IRQ_PRIORITY 8 +#define STM32_ST_USE_TIMER 2 + +/* + * UART driver system settings. + */ +#define STM32_UART_USE_USART1 FALSE +#define STM32_UART_USE_USART2 FALSE +#define STM32_UART_USE_USART3 FALSE +#define STM32_UART_USART1_IRQ_PRIORITY 12 +#define STM32_UART_USART2_IRQ_PRIORITY 12 +#define STM32_UART_USART3_IRQ_PRIORITY 12 +#define STM32_UART_USART1_DMA_PRIORITY 0 +#define STM32_UART_USART2_DMA_PRIORITY 0 +#define STM32_UART_USART3_DMA_PRIORITY 0 +#define STM32_UART_DMA_ERROR_HOOK(uartp) osalSysHalt("DMA failure") + +/* + * USB driver system settings. + */ +#define STM32_USB_USE_USB1 TRUE +#define STM32_USB_LOW_POWER_ON_SUSPEND FALSE +#define STM32_USB_USB1_HP_IRQ_PRIORITY 13 +#define STM32_USB_USB1_LP_IRQ_PRIORITY 14 + +#endif /* _MCUCONF_H_ */ diff --git a/keyboards/handwired/onekey/bluepill/readme.md b/keyboards/handwired/onekey/bluepill/readme.md new file mode 100644 index 0000000000..0bf1f5701c --- /dev/null +++ b/keyboards/handwired/onekey/bluepill/readme.md @@ -0,0 +1,3 @@ +# bluepill onekey + +To trigger keypress, short together pins *B0* and *A7*. diff --git a/keyboards/handwired/onekey/bluepill/rules.mk b/keyboards/handwired/onekey/bluepill/rules.mk new file mode 100644 index 0000000000..46274066dd --- /dev/null +++ b/keyboards/handwired/onekey/bluepill/rules.mk @@ -0,0 +1,37 @@ +# GENERIC STM32F103C8T6 board - stm32duino bootloader +OPT_DEFS = -DCORTEX_VTOR_INIT=0x2000 +MCU_LDSCRIPT = STM32F103x8_stm32duino_bootloader +BOARD = GENERIC_STM32_F103 + +# OPT_DEFS = +# MCU_LDSCRIPT = STM32F103x8 +# BOARD = GENERIC_STM32_F103 + +## chip/board settings +# the next two should match the directories in +# <chibios>/os/hal/ports/$(MCU_FAMILY)/$(MCU_SERIES) +MCU_FAMILY = STM32 +MCU_SERIES = STM32F1xx +# linker script to use +# it should exist either in <chibios>/os/common/ports/ARMCMx/compilers/GCC/ld/ +# or <this_dir>/ld/ +# startup code to use +# is should exist in <chibios>/os/common/ports/ARMCMx/compilers/GCC/mk/ +MCU_STARTUP = stm32f1xx +# it should exist either in <chibios>/os/hal/boards/ +# or <this_dir>/boards +# Cortex version +# Teensy LC is cortex-m0; Teensy 3.x are cortex-m4 +MCU = cortex-m3 +# ARM version, CORTEX-M0/M1 are 6, CORTEX-M3/M4/M7 are 7 +ARMV = 7 +# If you want to be able to jump to bootloader from firmware on STM32 MCUs, +# set the correct BOOTLOADER_ADDRESS. Either set it here, or define it in +# ./bootloader_defs.h or in ./boards/<FOO>/bootloader_defs.h (if you have +# a custom board definition that you plan to reuse). +# If you're not setting it here, leave it commented out. +# It is chip dependent, the correct number can be looked up here (page 175): +# http://www.st.com/web/en/resource/technical/document/application_note/CD00167594.pdf +# This also requires a patch to chibios: +# <tmk_dir>/tmk_core/tool/chibios/ch-bootloader-jump.patch +#STM32_BOOTLOADER_ADDRESS = 0x1FFFC800 diff --git a/keyboards/handwired/onekey/config.h b/keyboards/handwired/onekey/config.h index 4a3042eeae..6f7ec1289f 100644 --- a/keyboards/handwired/onekey/config.h +++ b/keyboards/handwired/onekey/config.h @@ -15,14 +15,11 @@ You should have received a copy of the GNU General Public License along with this program. If not, see <http://www.gnu.org/licenses/>. */ -#ifndef CONFIG_H -#define CONFIG_H - -#include "config_common.h" +#pragma once /* USB Device descriptor parameter */ #define VENDOR_ID 0xFEED -#define PRODUCT_ID 0x6464 +#define PRODUCT_ID 0x6465 #define DEVICE_VER 0x0001 #define MANUFACTURER none #define PRODUCT onekey @@ -32,10 +29,6 @@ along with this program. If not, see <http://www.gnu.org/licenses/>. #define MATRIX_ROWS 1 #define MATRIX_COLS 1 -#define MATRIX_COL_PINS { B0 } -#define MATRIX_ROW_PINS { D0 } -#define UNUSED_PINS - /* define if matrix has ghost */ //#define MATRIX_HAS_GHOST @@ -64,5 +57,3 @@ along with this program. If not, see <http://www.gnu.org/licenses/>. //#define NO_ACTION_ONESHOT //#define NO_ACTION_MACRO //#define NO_ACTION_FUNCTION - -#endif diff --git a/keyboards/handwired/onekey/elite_c/config.h b/keyboards/handwired/onekey/elite_c/config.h new file mode 100644 index 0000000000..fbcd630d79 --- /dev/null +++ b/keyboards/handwired/onekey/elite_c/config.h @@ -0,0 +1,23 @@ +/* Copyright 2019 + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +#include "config_common.h" + +#define MATRIX_COL_PINS { F4 } +#define MATRIX_ROW_PINS { F5 } +#define UNUSED_PINS diff --git a/keyboards/handwired/onekey/elite_c/readme.md b/keyboards/handwired/onekey/elite_c/readme.md new file mode 100644 index 0000000000..28a0885bb3 --- /dev/null +++ b/keyboards/handwired/onekey/elite_c/readme.md @@ -0,0 +1,3 @@ +# Elite-C onekey + +To trigger keypress, short together pins *F4* and *F5* (marked on the PCB as *A3* and *A2*). diff --git a/keyboards/handwired/onekey/elite_c/rules.mk b/keyboards/handwired/onekey/elite_c/rules.mk new file mode 100644 index 0000000000..eb7c443951 --- /dev/null +++ b/keyboards/handwired/onekey/elite_c/rules.mk @@ -0,0 +1,58 @@ +# MCU name +MCU = atmega32u4 + +# Processor frequency. +# This will define a symbol, F_CPU, in all source code files equal to the +# processor frequency in Hz. You can then use this symbol in your source code to +# calculate timings. Do NOT tack on a 'UL' at the end, this will be done +# automatically to create a 32-bit value in your source code. +# +# This will be an integer division of F_USB below, as it is sourced by +# F_USB after it has run through any CPU prescalers. Note that this value +# does not *change* the processor frequency - it should merely be updated to +# reflect the processor speed set externally so that the code can use accurate +# software delays. +F_CPU = 16000000 + + +# +# LUFA specific +# +# Target architecture (see library "Board Types" documentation). +ARCH = AVR8 + +# Input clock frequency. +# This will define a symbol, F_USB, in all source code files equal to the +# input clock frequency (before any prescaling is performed) in Hz. This value may +# differ from F_CPU if prescaling is used on the latter, and is required as the +# raw input clock is fed directly to the PLL sections of the AVR for high speed +# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL' +# at the end, this will be done automatically to create a 32-bit value in your +# source code. +# +# If no clock division is performed on the input clock inside the AVR (via the +# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU. +F_USB = $(F_CPU) + +# Interrupt driven control endpoint task(+60) +OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT + + +# Bootloader selection +# Teensy halfkay +# Pro Micro caterina +# Atmel DFU atmel-dfu +# LUFA DFU lufa-dfu +# QMK DFU qmk-dfu +# atmega32a bootloadHID +BOOTLOADER = atmel-dfu + + +# If you don't know the bootloader type, then you can specify the +# Boot Section Size in *bytes* by uncommenting out the OPT_DEFS line +# Teensy halfKay 512 +# Teensy++ halfKay 1024 +# Atmel DFU loader 4096 +# LUFA bootloader 4096 +# USBaspLoader 2048 +# OPT_DEFS += -DBOOTLOADER_SIZE=4096 diff --git a/keyboards/handwired/onekey/onekey.h b/keyboards/handwired/onekey/onekey.h index 8ce6fec2d0..2924ff3ff8 100644 --- a/keyboards/handwired/onekey/onekey.h +++ b/keyboards/handwired/onekey/onekey.h @@ -1,5 +1,20 @@ -#ifndef ONEKEY_H -#define ONEKEY_H +/* Copyright 2019 + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once #include "quantum.h" @@ -8,5 +23,3 @@ ) { \ { k00 } \ } - -#endif diff --git a/keyboards/handwired/onekey/promicro/config.h b/keyboards/handwired/onekey/promicro/config.h new file mode 100644 index 0000000000..fbcd630d79 --- /dev/null +++ b/keyboards/handwired/onekey/promicro/config.h @@ -0,0 +1,23 @@ +/* Copyright 2019 + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +#include "config_common.h" + +#define MATRIX_COL_PINS { F4 } +#define MATRIX_ROW_PINS { F5 } +#define UNUSED_PINS diff --git a/keyboards/handwired/onekey/promicro/readme.md b/keyboards/handwired/onekey/promicro/readme.md new file mode 100644 index 0000000000..260eab83de --- /dev/null +++ b/keyboards/handwired/onekey/promicro/readme.md @@ -0,0 +1,3 @@ +# Pro Micro onekey + +To trigger keypress, short together pins *F4* and *F5* (marked on the PCB as *A3* and *A2*). diff --git a/keyboards/handwired/onekey/promicro/rules.mk b/keyboards/handwired/onekey/promicro/rules.mk new file mode 100644 index 0000000000..dc6f196237 --- /dev/null +++ b/keyboards/handwired/onekey/promicro/rules.mk @@ -0,0 +1,58 @@ +# MCU name +MCU = atmega32u4 + +# Processor frequency. +# This will define a symbol, F_CPU, in all source code files equal to the +# processor frequency in Hz. You can then use this symbol in your source code to +# calculate timings. Do NOT tack on a 'UL' at the end, this will be done +# automatically to create a 32-bit value in your source code. +# +# This will be an integer division of F_USB below, as it is sourced by +# F_USB after it has run through any CPU prescalers. Note that this value +# does not *change* the processor frequency - it should merely be updated to +# reflect the processor speed set externally so that the code can use accurate +# software delays. +F_CPU = 16000000 + + +# +# LUFA specific +# +# Target architecture (see library "Board Types" documentation). +ARCH = AVR8 + +# Input clock frequency. +# This will define a symbol, F_USB, in all source code files equal to the +# input clock frequency (before any prescaling is performed) in Hz. This value may +# differ from F_CPU if prescaling is used on the latter, and is required as the +# raw input clock is fed directly to the PLL sections of the AVR for high speed +# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL' +# at the end, this will be done automatically to create a 32-bit value in your +# source code. +# +# If no clock division is performed on the input clock inside the AVR (via the +# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU. +F_USB = $(F_CPU) + +# Interrupt driven control endpoint task(+60) +OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT + + +# Bootloader selection +# Teensy halfkay +# Pro Micro caterina +# Atmel DFU atmel-dfu +# LUFA DFU lufa-dfu +# QMK DFU qmk-dfu +# atmega32a bootloadHID +BOOTLOADER = caterina + + +# If you don't know the bootloader type, then you can specify the +# Boot Section Size in *bytes* by uncommenting out the OPT_DEFS line +# Teensy halfKay 512 +# Teensy++ halfKay 1024 +# Atmel DFU loader 4096 +# LUFA bootloader 4096 +# USBaspLoader 2048 +# OPT_DEFS += -DBOOTLOADER_SIZE=4096 diff --git a/keyboards/handwired/onekey/proton_c/config.h b/keyboards/handwired/onekey/proton_c/config.h new file mode 100644 index 0000000000..f6bedcfe64 --- /dev/null +++ b/keyboards/handwired/onekey/proton_c/config.h @@ -0,0 +1,23 @@ +/* Copyright 2019 + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +#include "config_common.h" + +#define MATRIX_COL_PINS { A3 } +#define MATRIX_ROW_PINS { A2 } +#define UNUSED_PINS diff --git a/keyboards/handwired/onekey/proton_c/readme.md b/keyboards/handwired/onekey/proton_c/readme.md new file mode 100644 index 0000000000..0feedbbd46 --- /dev/null +++ b/keyboards/handwired/onekey/proton_c/readme.md @@ -0,0 +1,3 @@ +# Proton C onekey + +To trigger keypress, short together pins *A3* and *A2*. diff --git a/keyboards/handwired/onekey/proton_c/rules.mk b/keyboards/handwired/onekey/proton_c/rules.mk new file mode 100644 index 0000000000..b17a3d0316 --- /dev/null +++ b/keyboards/handwired/onekey/proton_c/rules.mk @@ -0,0 +1,2 @@ +# MCU name +MCU = STM32F303 diff --git a/keyboards/handwired/onekey/readme.md b/keyboards/handwired/onekey/readme.md index eab3b75a93..0e9d6a538a 100644 --- a/keyboards/handwired/onekey/readme.md +++ b/keyboards/handwired/onekey/readme.md @@ -2,11 +2,11 @@ Custom handwired one key keyboard. -Keyboard Maintainer: -Hardware Supported: Custom handwired one key +Keyboard Maintainer: QMK Community +Hardware Supported: bluepill, Elite-C, Pro Micro, Proton C, Teensy 2.0, Teensy++ 2.0, Teensy LC, Teensy 3.2 Hardware Availability: -Switch must be connected to pins B0 and D0. +**See each individual board for pin infomation** Make example for this keyboard (after setting up your build environment): diff --git a/keyboards/handwired/onekey/rules.mk b/keyboards/handwired/onekey/rules.mk index cfa693a73b..245f9025d7 100644 --- a/keyboards/handwired/onekey/rules.mk +++ b/keyboards/handwired/onekey/rules.mk @@ -1,61 +1,22 @@ - - -# MCU name -MCU = atmega32u4 - -# Processor frequency. -# This will define a symbol, F_CPU, in all source code files equal to the -# processor frequency in Hz. You can then use this symbol in your source code to -# calculate timings. Do NOT tack on a 'UL' at the end, this will be done -# automatically to create a 32-bit value in your source code. -# -# This will be an integer division of F_USB below, as it is sourced by -# F_USB after it has run through any CPU prescalers. Note that this value -# does not *change* the processor frequency - it should merely be updated to -# reflect the processor speed set externally so that the code can use accurate -# software delays. -F_CPU = 16000000 - - -# -# LUFA specific -# -# Target architecture (see library "Board Types" documentation). -ARCH = AVR8 - -# Input clock frequency. -# This will define a symbol, F_USB, in all source code files equal to the -# input clock frequency (before any prescaling is performed) in Hz. This value may -# differ from F_CPU if prescaling is used on the latter, and is required as the -# raw input clock is fed directly to the PLL sections of the AVR for high speed -# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL' -# at the end, this will be done automatically to create a 32-bit value in your -# source code. -# -# If no clock division is performed on the input clock inside the AVR (via the -# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU. -F_USB = $(F_CPU) - -# Interrupt driven control endpoint task(+60) -OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT - - -# Boot Section Size in *bytes* -# Teensy halfKay 512 -# Teensy++ halfKay 1024 -# Atmel DFU loader 4096 -# LUFA bootloader 4096 -# USBaspLoader 2048 -OPT_DEFS += -DBOOTLOADER_SIZE=4096 - - # Build Options -# comment out to disable the options. +# change yes to no to disable # -BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration(+1000) -MOUSEKEY_ENABLE = yes # Mouse keys(+4700) -EXTRAKEY_ENABLE = yes # Audio control and System control(+450) -CONSOLE_ENABLE = yes # Console for debug(+400) -COMMAND_ENABLE = yes # Commands for debug and configuration -#SLEEP_LED_ENABLE = yes # Breathing sleep LED during USB suspend -#NKRO_ENABLE = yes # USB Nkey Rollover - not yet supported in LUFA
\ No newline at end of file +BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration(+1000) +MOUSEKEY_ENABLE = yes # Mouse keys(+4700) +EXTRAKEY_ENABLE = yes # Audio control and System control(+450) +CONSOLE_ENABLE = yes # Console for debug(+400) +COMMAND_ENABLE = yes # Commands for debug and configuration +# Do not enable SLEEP_LED_ENABLE. it uses the same timer as BACKLIGHT_ENABLE +SLEEP_LED_ENABLE = yes # Breathing sleep LED during USB suspend +# if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work +NKRO_ENABLE = yes # USB Nkey Rollover +BACKLIGHT_ENABLE = no # Enable keyboard backlight functionality on B7 by default +RGBLIGHT_ENABLE = no # Enable keyboard RGB underglow +MIDI_ENABLE = no # MIDI support (+2400 to 4200, depending on config) +UNICODE_ENABLE = no # Unicode +BLUETOOTH_ENABLE = no # Enable Bluetooth with the Adafruit EZ-Key HID +AUDIO_ENABLE = no # Audio output on port C6 +FAUXCLICKY_ENABLE = no # Use buzzer to emulate clicky switches +HD44780_ENABLE = no # Enable support for HD44780 based LCDs (+400) + +DEFAULT_FOLDER = handwired/onekey/promicro diff --git a/keyboards/handwired/onekey/teensy_2/config.h b/keyboards/handwired/onekey/teensy_2/config.h new file mode 100644 index 0000000000..fbcd630d79 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_2/config.h @@ -0,0 +1,23 @@ +/* Copyright 2019 + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +#include "config_common.h" + +#define MATRIX_COL_PINS { F4 } +#define MATRIX_ROW_PINS { F5 } +#define UNUSED_PINS diff --git a/keyboards/handwired/onekey/teensy_2/readme.md b/keyboards/handwired/onekey/teensy_2/readme.md new file mode 100644 index 0000000000..86a3114e56 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_2/readme.md @@ -0,0 +1,3 @@ +# Teensy 2.0 onekey + +To trigger keypress, short together pins *F4* and *F5* diff --git a/keyboards/handwired/onekey/teensy_2/rules.mk b/keyboards/handwired/onekey/teensy_2/rules.mk new file mode 100644 index 0000000000..3fb7c7e5a7 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_2/rules.mk @@ -0,0 +1,58 @@ +# MCU name +MCU = atmega32u4 + +# Processor frequency. +# This will define a symbol, F_CPU, in all source code files equal to the +# processor frequency in Hz. You can then use this symbol in your source code to +# calculate timings. Do NOT tack on a 'UL' at the end, this will be done +# automatically to create a 32-bit value in your source code. +# +# This will be an integer division of F_USB below, as it is sourced by +# F_USB after it has run through any CPU prescalers. Note that this value +# does not *change* the processor frequency - it should merely be updated to +# reflect the processor speed set externally so that the code can use accurate +# software delays. +F_CPU = 16000000 + + +# +# LUFA specific +# +# Target architecture (see library "Board Types" documentation). +ARCH = AVR8 + +# Input clock frequency. +# This will define a symbol, F_USB, in all source code files equal to the +# input clock frequency (before any prescaling is performed) in Hz. This value may +# differ from F_CPU if prescaling is used on the latter, and is required as the +# raw input clock is fed directly to the PLL sections of the AVR for high speed +# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL' +# at the end, this will be done automatically to create a 32-bit value in your +# source code. +# +# If no clock division is performed on the input clock inside the AVR (via the +# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU. +F_USB = $(F_CPU) + +# Interrupt driven control endpoint task(+60) +OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT + + +# Bootloader selection +# Teensy halfkay +# Pro Micro caterina +# Atmel DFU atmel-dfu +# LUFA DFU lufa-dfu +# QMK DFU qmk-dfu +# atmega32a bootloadHID +BOOTLOADER = halfkay + + +# If you don't know the bootloader type, then you can specify the +# Boot Section Size in *bytes* by uncommenting out the OPT_DEFS line +# Teensy halfKay 512 +# Teensy++ halfKay 1024 +# Atmel DFU loader 4096 +# LUFA bootloader 4096 +# USBaspLoader 2048 +# OPT_DEFS += -DBOOTLOADER_SIZE=4096 diff --git a/keyboards/handwired/onekey/teensy_2pp/config.h b/keyboards/handwired/onekey/teensy_2pp/config.h new file mode 100644 index 0000000000..9d993980c2 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_2pp/config.h @@ -0,0 +1,23 @@ +/* Copyright 2019 + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +#include "config_common.h" + +#define MATRIX_COL_PINS { B2 } +#define MATRIX_ROW_PINS { B1 } +#define UNUSED_PINS diff --git a/keyboards/handwired/onekey/teensy_2pp/readme.md b/keyboards/handwired/onekey/teensy_2pp/readme.md new file mode 100644 index 0000000000..9cb99e1181 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_2pp/readme.md @@ -0,0 +1,3 @@ +# Teensy++ 2.0 onekey + +To trigger keypress, short together pins *B2* and *B1* diff --git a/keyboards/handwired/onekey/teensy_2pp/rules.mk b/keyboards/handwired/onekey/teensy_2pp/rules.mk new file mode 100644 index 0000000000..e318e4b9e7 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_2pp/rules.mk @@ -0,0 +1,58 @@ +# MCU name +MCU = at90usb1286 + +# Processor frequency. +# This will define a symbol, F_CPU, in all source code files equal to the +# processor frequency in Hz. You can then use this symbol in your source code to +# calculate timings. Do NOT tack on a 'UL' at the end, this will be done +# automatically to create a 32-bit value in your source code. +# +# This will be an integer division of F_USB below, as it is sourced by +# F_USB after it has run through any CPU prescalers. Note that this value +# does not *change* the processor frequency - it should merely be updated to +# reflect the processor speed set externally so that the code can use accurate +# software delays. +F_CPU = 16000000 + + +# +# LUFA specific +# +# Target architecture (see library "Board Types" documentation). +ARCH = AVR8 + +# Input clock frequency. +# This will define a symbol, F_USB, in all source code files equal to the +# input clock frequency (before any prescaling is performed) in Hz. This value may +# differ from F_CPU if prescaling is used on the latter, and is required as the +# raw input clock is fed directly to the PLL sections of the AVR for high speed +# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL' +# at the end, this will be done automatically to create a 32-bit value in your +# source code. +# +# If no clock division is performed on the input clock inside the AVR (via the +# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU. +F_USB = $(F_CPU) + +# Interrupt driven control endpoint task(+60) +OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT + + +# Bootloader selection +# Teensy halfkay +# Pro Micro caterina +# Atmel DFU atmel-dfu +# LUFA DFU lufa-dfu +# QMK DFU qmk-dfu +# atmega32a bootloadHID +BOOTLOADER = halfkay + + +# If you don't know the bootloader type, then you can specify the +# Boot Section Size in *bytes* by uncommenting out the OPT_DEFS line +# Teensy halfKay 512 +# Teensy++ halfKay 1024 +# Atmel DFU loader 4096 +# LUFA bootloader 4096 +# USBaspLoader 2048 +# OPT_DEFS += -DBOOTLOADER_SIZE=4096 diff --git a/keyboards/handwired/onekey/teensy_32/chconf.h b/keyboards/handwired/onekey/teensy_32/chconf.h new file mode 100644 index 0000000000..3294ac7eee --- /dev/null +++ b/keyboards/handwired/onekey/teensy_32/chconf.h @@ -0,0 +1,524 @@ +/* + ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +/** + * @file templates/chconf.h + * @brief Configuration file template. + * @details A copy of this file must be placed in each project directory, it + * contains the application specific kernel settings. + * + * @addtogroup config + * @details Kernel related settings and hooks. + * @{ + */ + +#ifndef CHCONF_H +#define CHCONF_H + +#define _CHIBIOS_RT_CONF_ + +/*===========================================================================*/ +/** + * @name System timers settings + * @{ + */ +/*===========================================================================*/ + +/** + * @brief System time counter resolution. + * @note Allowed values are 16 or 32 bits. + */ +#define CH_CFG_ST_RESOLUTION 32 + +/** + * @brief System tick frequency. + * @details Frequency of the system timer that drives the system ticks. This + * setting also defines the system tick time unit. + */ +#define CH_CFG_ST_FREQUENCY 1000 + +/** + * @brief Time delta constant for the tick-less mode. + * @note If this value is zero then the system uses the classic + * periodic tick. This value represents the minimum number + * of ticks that is safe to specify in a timeout directive. + * The value one is not valid, timeouts are rounded up to + * this value. + */ +#define CH_CFG_ST_TIMEDELTA 0 + +/** @} */ + +/*===========================================================================*/ +/** + * @name Kernel parameters and options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Round robin interval. + * @details This constant is the number of system ticks allowed for the + * threads before preemption occurs. Setting this value to zero + * disables the preemption for threads with equal priority and the + * round robin becomes cooperative. Note that higher priority + * threads can still preempt, the kernel is always preemptive. + * @note Disabling the round robin preemption makes the kernel more compact + * and generally faster. + * @note The round robin preemption is not supported in tickless mode and + * must be set to zero in that case. + */ +#define CH_CFG_TIME_QUANTUM 20 + +/** + * @brief Managed RAM size. + * @details Size of the RAM area to be managed by the OS. If set to zero + * then the whole available RAM is used. The core memory is made + * available to the heap allocator and/or can be used directly through + * the simplified core memory allocator. + * + * @note In order to let the OS manage the whole RAM the linker script must + * provide the @p __heap_base__ and @p __heap_end__ symbols. + * @note Requires @p CH_CFG_USE_MEMCORE. + */ +#define CH_CFG_MEMCORE_SIZE 0 + +/** + * @brief Idle thread automatic spawn suppression. + * @details When this option is activated the function @p chSysInit() + * does not spawn the idle thread. The application @p main() + * function becomes the idle thread and must implement an + * infinite loop. + */ +#define CH_CFG_NO_IDLE_THREAD FALSE + +/* Use __WFI in the idle thread for waiting. Does lower the power + * consumption. */ +#define CORTEX_ENABLE_WFI_IDLE TRUE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Performance options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief OS optimization. + * @details If enabled then time efficient rather than space efficient code + * is used when two possible implementations exist. + * + * @note This is not related to the compiler optimization options. + * @note The default is @p TRUE. + */ +#define CH_CFG_OPTIMIZE_SPEED TRUE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Subsystem options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Time Measurement APIs. + * @details If enabled then the time measurement APIs are included in + * the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_TM FALSE + +/** + * @brief Threads registry APIs. + * @details If enabled then the registry APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_REGISTRY TRUE + +/** + * @brief Threads synchronization APIs. + * @details If enabled then the @p chThdWait() function is included in + * the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_WAITEXIT TRUE + +/** + * @brief Semaphores APIs. + * @details If enabled then the Semaphores APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_SEMAPHORES TRUE + +/** + * @brief Semaphores queuing mode. + * @details If enabled then the threads are enqueued on semaphores by + * priority rather than in FIFO order. + * + * @note The default is @p FALSE. Enable this if you have special + * requirements. + * @note Requires @p CH_CFG_USE_SEMAPHORES. + */ +#define CH_CFG_USE_SEMAPHORES_PRIORITY FALSE + +/** + * @brief Mutexes APIs. + * @details If enabled then the mutexes APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MUTEXES TRUE + +/** + * @brief Enables recursive behavior on mutexes. + * @note Recursive mutexes are heavier and have an increased + * memory footprint. + * + * @note The default is @p FALSE. + * @note Requires @p CH_CFG_USE_MUTEXES. + */ +#define CH_CFG_USE_MUTEXES_RECURSIVE FALSE + +/** + * @brief Conditional Variables APIs. + * @details If enabled then the conditional variables APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_MUTEXES. + */ +#define CH_CFG_USE_CONDVARS TRUE + +/** + * @brief Conditional Variables APIs with timeout. + * @details If enabled then the conditional variables APIs with timeout + * specification are included in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_CONDVARS. + */ +#define CH_CFG_USE_CONDVARS_TIMEOUT TRUE + +/** + * @brief Events Flags APIs. + * @details If enabled then the event flags APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_EVENTS TRUE + +/** + * @brief Events Flags APIs with timeout. + * @details If enabled then the events APIs with timeout specification + * are included in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_EVENTS. + */ +#define CH_CFG_USE_EVENTS_TIMEOUT TRUE + +/** + * @brief Synchronous Messages APIs. + * @details If enabled then the synchronous messages APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MESSAGES TRUE + +/** + * @brief Synchronous Messages queuing mode. + * @details If enabled then messages are served by priority rather than in + * FIFO order. + * + * @note The default is @p FALSE. Enable this if you have special + * requirements. + * @note Requires @p CH_CFG_USE_MESSAGES. + */ +#define CH_CFG_USE_MESSAGES_PRIORITY FALSE + +/** + * @brief Mailboxes APIs. + * @details If enabled then the asynchronous messages (mailboxes) APIs are + * included in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_SEMAPHORES. + */ +#define CH_CFG_USE_MAILBOXES TRUE + +/** + * @brief Core Memory Manager APIs. + * @details If enabled then the core memory manager APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MEMCORE TRUE + +/** + * @brief Heap Allocator APIs. + * @details If enabled then the memory heap allocator APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_MEMCORE and either @p CH_CFG_USE_MUTEXES or + * @p CH_CFG_USE_SEMAPHORES. + * @note Mutexes are recommended. + */ +#define CH_CFG_USE_HEAP TRUE + +/** + * @brief Memory Pools Allocator APIs. + * @details If enabled then the memory pools allocator APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MEMPOOLS TRUE + +/** + * @brief Dynamic Threads APIs. + * @details If enabled then the dynamic threads creation APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_WAITEXIT. + * @note Requires @p CH_CFG_USE_HEAP and/or @p CH_CFG_USE_MEMPOOLS. + */ +#define CH_CFG_USE_DYNAMIC TRUE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Debug options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Debug option, kernel statistics. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_STATISTICS FALSE + +/** + * @brief Debug option, system state check. + * @details If enabled the correct call protocol for system APIs is checked + * at runtime. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_SYSTEM_STATE_CHECK TRUE + +/** + * @brief Debug option, parameters checks. + * @details If enabled then the checks on the API functions input + * parameters are activated. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_ENABLE_CHECKS TRUE + +/** + * @brief Debug option, consistency checks. + * @details If enabled then all the assertions in the kernel code are + * activated. This includes consistency checks inside the kernel, + * runtime anomalies and port-defined checks. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_ENABLE_ASSERTS TRUE + +/** + * @brief Debug option, trace buffer. + * @details If enabled then the trace buffer is activated. + * + * @note The default is @p CH_DBG_TRACE_MASK_DISABLED. + */ +#define CH_DBG_TRACE_MASK CH_DBG_TRACE_MASK_DISABLED + +/** + * @brief Trace buffer entries. + * @note The trace buffer is only allocated if @p CH_DBG_TRACE_MASK is + * different from @p CH_DBG_TRACE_MASK_DISABLED. + */ +#define CH_DBG_TRACE_BUFFER_SIZE 128 + +/** + * @brief Debug option, stack checks. + * @details If enabled then a runtime stack check is performed. + * + * @note The default is @p FALSE. + * @note The stack check is performed in a architecture/port dependent way. + * It may not be implemented or some ports. + * @note The default failure mode is to halt the system with the global + * @p panic_msg variable set to @p NULL. + */ +#define CH_DBG_ENABLE_STACK_CHECK TRUE + +/** + * @brief Debug option, stacks initialization. + * @details If enabled then the threads working area is filled with a byte + * value when a thread is created. This can be useful for the + * runtime measurement of the used stack. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_FILL_THREADS TRUE + +/** + * @brief Debug option, threads profiling. + * @details If enabled then a field is added to the @p thread_t structure that + * counts the system ticks occurred while executing the thread. + * + * @note The default is @p FALSE. + * @note This debug option is not currently compatible with the + * tickless mode. + */ +#define CH_DBG_THREADS_PROFILING FALSE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Kernel hooks + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Threads descriptor structure extension. + * @details User fields added to the end of the @p thread_t structure. + */ +#define CH_CFG_THREAD_EXTRA_FIELDS \ + /* Add threads custom fields here.*/ + +/** + * @brief Threads initialization hook. + * @details User initialization code added to the @p chThdInit() API. + * + * @note It is invoked from within @p chThdInit() and implicitly from all + * the threads creation APIs. + */ +#define CH_CFG_THREAD_INIT_HOOK(tp) { \ + /* Add threads initialization code here.*/ \ +} + +/** + * @brief Threads finalization hook. + * @details User finalization code added to the @p chThdExit() API. + */ +#define CH_CFG_THREAD_EXIT_HOOK(tp) { \ + /* Add threads finalization code here.*/ \ +} + +/** + * @brief Context switch hook. + * @details This hook is invoked just before switching between threads. + */ +#define CH_CFG_CONTEXT_SWITCH_HOOK(ntp, otp) { \ + /* Context switch code here.*/ \ +} + +/** + * @brief ISR enter hook. + */ +#define CH_CFG_IRQ_PROLOGUE_HOOK() { \ + /* IRQ prologue code here.*/ \ +} + +/** + * @brief ISR exit hook. + */ +#define CH_CFG_IRQ_EPILOGUE_HOOK() { \ + /* IRQ epilogue code here.*/ \ +} + +/** + * @brief Idle thread enter hook. + * @note This hook is invoked within a critical zone, no OS functions + * should be invoked from here. + * @note This macro can be used to activate a power saving mode. + */ +#define CH_CFG_IDLE_ENTER_HOOK() { \ + /* Idle-enter code here.*/ \ +} + +/** + * @brief Idle thread leave hook. + * @note This hook is invoked within a critical zone, no OS functions + * should be invoked from here. + * @note This macro can be used to deactivate a power saving mode. + */ +#define CH_CFG_IDLE_LEAVE_HOOK() { \ + /* Idle-leave code here.*/ \ +} + +/** + * @brief Idle Loop hook. + * @details This hook is continuously invoked by the idle thread loop. + */ +#define CH_CFG_IDLE_LOOP_HOOK() { \ + /* Idle loop code here.*/ \ +} + +/** + * @brief System tick event hook. + * @details This hook is invoked in the system tick handler immediately + * after processing the virtual timers queue. + */ +#define CH_CFG_SYSTEM_TICK_HOOK() { \ + /* System tick event code here.*/ \ +} + +/** + * @brief System halt hook. + * @details This hook is invoked in case to a system halting error before + * the system is halted. + */ +#define CH_CFG_SYSTEM_HALT_HOOK(reason) { \ + /* System halt code here.*/ \ +} + +/** + * @brief Trace hook. + * @details This hook is invoked each time a new record is written in the + * trace buffer. + */ +#define CH_CFG_TRACE_HOOK(tep) { \ + /* Trace code here.*/ \ +} + +/** @} */ + +/*===========================================================================*/ +/* Port-specific settings (override port settings defaulted in chcore.h). */ +/*===========================================================================*/ + +#endif /* CHCONF_H */ + +/** @} */ diff --git a/keyboards/handwired/onekey/teensy_32/config.h b/keyboards/handwired/onekey/teensy_32/config.h new file mode 100644 index 0000000000..0d82a05786 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_32/config.h @@ -0,0 +1,24 @@ +/* Copyright 2019 + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +// TODO: including this causes "error: expected identifier before '(' token" errors +//#include "config_common.h" + +#define MATRIX_COL_PINS { D5 } +#define MATRIX_ROW_PINS { B2 } +#define UNUSED_PINS diff --git a/keyboards/handwired/onekey/teensy_32/halconf.h b/keyboards/handwired/onekey/teensy_32/halconf.h new file mode 100644 index 0000000000..1b6f2adc20 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_32/halconf.h @@ -0,0 +1,354 @@ +/* + ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +/** + * @file templates/halconf.h + * @brief HAL configuration header. + * @details HAL configuration file, this file allows to enable or disable the + * various device drivers from your application. You may also use + * this file in order to override the device drivers default settings. + * + * @addtogroup HAL_CONF + * @{ + */ + +#ifndef _HALCONF_H_ +#define _HALCONF_H_ + +#include "mcuconf.h" + +/** + * @brief Enables the PAL subsystem. + */ +#if !defined(HAL_USE_PAL) || defined(__DOXYGEN__) +#define HAL_USE_PAL TRUE +#endif + +/** + * @brief Enables the ADC subsystem. + */ +#if !defined(HAL_USE_ADC) || defined(__DOXYGEN__) +#define HAL_USE_ADC FALSE +#endif + +/** + * @brief Enables the CAN subsystem. + */ +#if !defined(HAL_USE_CAN) || defined(__DOXYGEN__) +#define HAL_USE_CAN FALSE +#endif + +/** + * @brief Enables the DAC subsystem. + */ +#if !defined(HAL_USE_DAC) || defined(__DOXYGEN__) +#define HAL_USE_DAC FALSE +#endif + +/** + * @brief Enables the EXT subsystem. + */ +#if !defined(HAL_USE_EXT) || defined(__DOXYGEN__) +#define HAL_USE_EXT FALSE +#endif + +/** + * @brief Enables the GPT subsystem. + */ +#if !defined(HAL_USE_GPT) || defined(__DOXYGEN__) +#define HAL_USE_GPT FALSE +#endif + +/** + * @brief Enables the I2C subsystem. + */ +#if !defined(HAL_USE_I2C) || defined(__DOXYGEN__) +#define HAL_USE_I2C FALSE +#endif + +/** + * @brief Enables the I2S subsystem. + */ +#if !defined(HAL_USE_I2S) || defined(__DOXYGEN__) +#define HAL_USE_I2S FALSE +#endif + +/** + * @brief Enables the ICU subsystem. + */ +#if !defined(HAL_USE_ICU) || defined(__DOXYGEN__) +#define HAL_USE_ICU FALSE +#endif + +/** + * @brief Enables the MAC subsystem. + */ +#if !defined(HAL_USE_MAC) || defined(__DOXYGEN__) +#define HAL_USE_MAC FALSE +#endif + +/** + * @brief Enables the MMC_SPI subsystem. + */ +#if !defined(HAL_USE_MMC_SPI) || defined(__DOXYGEN__) +#define HAL_USE_MMC_SPI FALSE +#endif + +/** + * @brief Enables the PWM subsystem. + */ +#if !defined(HAL_USE_PWM) || defined(__DOXYGEN__) +#define HAL_USE_PWM FALSE +#endif + +/** + * @brief Enables the RTC subsystem. + */ +#if !defined(HAL_USE_RTC) || defined(__DOXYGEN__) +#define HAL_USE_RTC FALSE +#endif + +/** + * @brief Enables the SDC subsystem. + */ +#if !defined(HAL_USE_SDC) || defined(__DOXYGEN__) +#define HAL_USE_SDC FALSE +#endif + +/** + * @brief Enables the SERIAL subsystem. + */ +#if !defined(HAL_USE_SERIAL) || defined(__DOXYGEN__) +#define HAL_USE_SERIAL FALSE +#endif + +/** + * @brief Enables the SERIAL over USB subsystem. + */ +#if !defined(HAL_USE_SERIAL_USB) || defined(__DOXYGEN__) +#define HAL_USE_SERIAL_USB FALSE +#endif + +/** + * @brief Enables the SPI subsystem. + */ +#if !defined(HAL_USE_SPI) || defined(__DOXYGEN__) +#define HAL_USE_SPI FALSE +#endif + +/** + * @brief Enables the UART subsystem. + */ +#if !defined(HAL_USE_UART) || defined(__DOXYGEN__) +#define HAL_USE_UART FALSE +#endif + +/** + * @brief Enables the USB subsystem. + */ +#if !defined(HAL_USE_USB) || defined(__DOXYGEN__) +#define HAL_USE_USB TRUE +#endif + +/** + * @brief Enables the WDG subsystem. + */ +#if !defined(HAL_USE_WDG) || defined(__DOXYGEN__) +#define HAL_USE_WDG FALSE +#endif + +/*===========================================================================*/ +/* ADC driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables synchronous APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(ADC_USE_WAIT) || defined(__DOXYGEN__) +#define ADC_USE_WAIT TRUE +#endif + +/** + * @brief Enables the @p adcAcquireBus() and @p adcReleaseBus() APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(ADC_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) +#define ADC_USE_MUTUAL_EXCLUSION TRUE +#endif + +/*===========================================================================*/ +/* CAN driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Sleep mode related APIs inclusion switch. + */ +#if !defined(CAN_USE_SLEEP_MODE) || defined(__DOXYGEN__) +#define CAN_USE_SLEEP_MODE TRUE +#endif + +/*===========================================================================*/ +/* I2C driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables the mutual exclusion APIs on the I2C bus. + */ +#if !defined(I2C_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) +#define I2C_USE_MUTUAL_EXCLUSION TRUE +#endif + +/*===========================================================================*/ +/* MAC driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables an event sources for incoming packets. + */ +#if !defined(MAC_USE_ZERO_COPY) || defined(__DOXYGEN__) +#define MAC_USE_ZERO_COPY FALSE +#endif + +/** + * @brief Enables an event sources for incoming packets. + */ +#if !defined(MAC_USE_EVENTS) || defined(__DOXYGEN__) +#define MAC_USE_EVENTS TRUE +#endif + +/*===========================================================================*/ +/* MMC_SPI driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Delays insertions. + * @details If enabled this options inserts delays into the MMC waiting + * routines releasing some extra CPU time for the threads with + * lower priority, this may slow down the driver a bit however. + * This option is recommended also if the SPI driver does not + * use a DMA channel and heavily loads the CPU. + */ +#if !defined(MMC_NICE_WAITING) || defined(__DOXYGEN__) +#define MMC_NICE_WAITING TRUE +#endif + +/*===========================================================================*/ +/* SDC driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Number of initialization attempts before rejecting the card. + * @note Attempts are performed at 10mS intervals. + */ +#if !defined(SDC_INIT_RETRY) || defined(__DOXYGEN__) +#define SDC_INIT_RETRY 100 +#endif + +/** + * @brief Include support for MMC cards. + * @note MMC support is not yet implemented so this option must be kept + * at @p FALSE. + */ +#if !defined(SDC_MMC_SUPPORT) || defined(__DOXYGEN__) +#define SDC_MMC_SUPPORT FALSE +#endif + +/** + * @brief Delays insertions. + * @details If enabled this options inserts delays into the MMC waiting + * routines releasing some extra CPU time for the threads with + * lower priority, this may slow down the driver a bit however. + */ +#if !defined(SDC_NICE_WAITING) || defined(__DOXYGEN__) +#define SDC_NICE_WAITING TRUE +#endif + +/*===========================================================================*/ +/* SERIAL driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Default bit rate. + * @details Configuration parameter, this is the baud rate selected for the + * default configuration. + */ +#if !defined(SERIAL_DEFAULT_BITRATE) || defined(__DOXYGEN__) +#define SERIAL_DEFAULT_BITRATE 38400 +#endif + +/** + * @brief Serial buffers size. + * @details Configuration parameter, you can change the depth of the queue + * buffers depending on the requirements of your application. + * @note The default is 64 bytes for both the transmission and receive + * buffers. + */ +#if !defined(SERIAL_BUFFERS_SIZE) || defined(__DOXYGEN__) +#define SERIAL_BUFFERS_SIZE 16 +#endif + +/*===========================================================================*/ +/* SERIAL_USB driver related setting. */ +/*===========================================================================*/ + +/** + * @brief Serial over USB buffers size. + * @details Configuration parameter, the buffer size must be a multiple of + * the USB data endpoint maximum packet size. + * @note The default is 64 bytes for both the transmission and receive + * buffers. + */ +#if !defined(SERIAL_USB_BUFFERS_SIZE) || defined(__DOXYGEN__) +#define SERIAL_USB_BUFFERS_SIZE 1 +#endif + +/*===========================================================================*/ +/* SPI driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables synchronous APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(SPI_USE_WAIT) || defined(__DOXYGEN__) +#define SPI_USE_WAIT TRUE +#endif + +/** + * @brief Enables the @p spiAcquireBus() and @p spiReleaseBus() APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(SPI_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) +#define SPI_USE_MUTUAL_EXCLUSION TRUE +#endif + +/*===========================================================================*/ +/* USB driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables synchronous APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(USB_USE_WAIT) || defined(__DOXYGEN__) +#define USB_USE_WAIT TRUE +#endif + +#endif /* _HALCONF_H_ */ + +/** @} */ + diff --git a/keyboards/handwired/onekey/teensy_32/ld/MK20DX256.ld b/keyboards/handwired/onekey/teensy_32/ld/MK20DX256.ld new file mode 100644 index 0000000000..66bc6b81e2 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_32/ld/MK20DX256.ld @@ -0,0 +1,101 @@ +/* + * Copyright (C) 2013-2016 Fabio Utzig, http://fabioutzig.com + * (C) 2016 flabbergast <s3+flabbergast@sdfeu.org> + * + * Permission is hereby granted, free of charge, to any person obtaining + * a copy of this software and associated documentation files (the "Software"), + * to deal in the Software without restriction, including without limitation + * the rights to use, copy, modify, merge, publish, distribute, sublicense, + * and/or sell copies of the Software, and to permit persons to whom the + * Software is furnished to do so, subject to the following conditions: + * + * The above copyright notice and this permission notice shall be included in + * all copies or substantial portions of the Software. + * + * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS + * OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, + * FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE + * AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER + * LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, + * OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE + * SOFTWARE. + */ + +/* + * MK20DX256 memory setup. + */ +MEMORY +{ + flash0 : org = 0x00000000, len = 0x400 + flash1 : org = 0x00000400, len = 0x10 + flash2 : org = 0x00000410, len = 256k - 0x410 + flash3 : org = 0x00000000, len = 0 + flash4 : org = 0x00000000, len = 0 + flash5 : org = 0x00000000, len = 0 + flash6 : org = 0x00000000, len = 0 + flash7 : org = 0x00000000, len = 0 + ram0 : org = 0x1FFF8000, len = 64k + ram1 : org = 0x00000000, len = 0 + ram2 : org = 0x00000000, len = 0 + ram3 : org = 0x00000000, len = 0 + ram4 : org = 0x00000000, len = 0 + ram5 : org = 0x00000000, len = 0 + ram6 : org = 0x00000000, len = 0 + ram7 : org = 0x00000000, len = 0 +} + +/* Flash region for the configuration bytes.*/ +SECTIONS +{ + .cfmprotect : ALIGN(4) SUBALIGN(4) + { + KEEP(*(.cfmconfig)) + } > flash1 +} + +/* For each data/text section two region are defined, a virtual region + and a load region (_LMA suffix).*/ + +/* Flash region to be used for exception vectors.*/ +REGION_ALIAS("VECTORS_FLASH", flash0); +REGION_ALIAS("VECTORS_FLASH_LMA", flash0); + +/* Flash region to be used for constructors and destructors.*/ +REGION_ALIAS("XTORS_FLASH", flash2); +REGION_ALIAS("XTORS_FLASH_LMA", flash2); + +/* Flash region to be used for code text.*/ +REGION_ALIAS("TEXT_FLASH", flash2); +REGION_ALIAS("TEXT_FLASH_LMA", flash2); + +/* Flash region to be used for read only data.*/ +REGION_ALIAS("RODATA_FLASH", flash2); +REGION_ALIAS("RODATA_FLASH_LMA", flash2); + +/* Flash region to be used for various.*/ +REGION_ALIAS("VARIOUS_FLASH", flash2); +REGION_ALIAS("VARIOUS_FLASH_LMA", flash2); + +/* Flash region to be used for RAM(n) initialization data.*/ +REGION_ALIAS("RAM_INIT_FLASH_LMA", flash2); + +/* RAM region to be used for Main stack. This stack accommodates the processing + of all exceptions and interrupts.*/ +REGION_ALIAS("MAIN_STACK_RAM", ram0); + +/* RAM region to be used for the process stack. This is the stack used by + the main() function.*/ +REGION_ALIAS("PROCESS_STACK_RAM", ram0); + +/* RAM region to be used for data segment.*/ +REGION_ALIAS("DATA_RAM", ram0); +REGION_ALIAS("DATA_RAM_LMA", flash2); + +/* RAM region to be used for BSS segment.*/ +REGION_ALIAS("BSS_RAM", ram0); + +/* RAM region to be used for the default heap.*/ +REGION_ALIAS("HEAP_RAM", ram0); + +/* Generic rules inclusion.*/ +INCLUDE rules.ld diff --git a/keyboards/handwired/onekey/teensy_32/mcuconf.h b/keyboards/handwired/onekey/teensy_32/mcuconf.h new file mode 100644 index 0000000000..13a9e3333f --- /dev/null +++ b/keyboards/handwired/onekey/teensy_32/mcuconf.h @@ -0,0 +1,45 @@ +/* + ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +#ifndef _MCUCONF_H_ +#define _MCUCONF_H_ + +#define K20x_MCUCONF + +/* + * HAL driver system settings. + */ +/* PEE mode - 48MHz system clock driven by (16 MHz) external crystal. */ +#define KINETIS_MCG_MODE KINETIS_MCG_MODE_PEE +#define KINETIS_PLLCLK_FREQUENCY 96000000UL +#define KINETIS_SYSCLK_FREQUENCY 48000000UL + +/* + * SERIAL driver system settings. + */ +#define KINETIS_SERIAL_USE_UART0 TRUE + +/* + * USB driver settings + */ +#define KINETIS_USB_USE_USB0 TRUE + +/* Need to redefine this, since the default (configured for K20x) might not apply + * 2 for Teensy LC + * 5 for Teensy 3.x */ +#define KINETIS_USB_USB0_IRQ_PRIORITY 5 + +#endif /* _MCUCONF_H_ */ diff --git a/keyboards/handwired/onekey/teensy_32/readme.md b/keyboards/handwired/onekey/teensy_32/readme.md new file mode 100644 index 0000000000..216aecfaf7 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_32/readme.md @@ -0,0 +1,40 @@ +# Teensy 3.2 onekey + +To trigger keypress, short together pins *D5* and *B2* (marked on the PCB as *20* and *19*). + +## Hardware + +### Pins +When setting matrix pins, you need to use the MCU definitions instead of what is printed on the PCB. Sourced from <https://www.pjrc.com/teensy/schematic32.gif>. The following table can be used to convert between the two. + +| PCB | MCU | Notes | +|------- |-----|-----------------------------| +| 0 | B16 | | +| 1 | B17 | | +| 2 | D0 | | +| 3 | A12 | | +| 4 | A13 | | +| 5 | D7 | | +| 6 | D4 | | +| 7 | D2 | | +| 8 | D3 | | +| 9 | C3 | | +| 10 | C4 | | +| 11 | C6 | | +| 12 | C7 | | +| 13/LED | C5 | | +| 14/A0 | D1 | | +| 15/A1 | C0 | | +| 16/A2 | B0 | | +| 17/A3 | B1 | | +| 18/A4 | B3 | | +| 19/A5 | B2 | | +| 20/A6 | D5 | | +| 21/A7 | D6 | | +| 22/A8 | C1 | | +| 23/A9 | C2 | | +| 24/A10 | | ADC0_DP0 in schematic *[1]* | +| 25/A11 | | ADC0_DM0 in schematic *[1]* | +| 26/A12 | | ADC0_DP3 in schematic *[1]* | + +*[1]* - Currently not configured and may require extra work to implement. diff --git a/keyboards/handwired/onekey/teensy_32/rules.mk b/keyboards/handwired/onekey/teensy_32/rules.mk new file mode 100644 index 0000000000..97171611ef --- /dev/null +++ b/keyboards/handwired/onekey/teensy_32/rules.mk @@ -0,0 +1,41 @@ +## chip/board settings +# - the next two should match the directories in +# <chibios>/os/hal/ports/$(MCU_FAMILY)/$(MCU_SERIES) +# - For Teensies, FAMILY = KINETIS and SERIES is either +# KL2x (LC) or K20x (3.0,3.1,3.2). +MCU_FAMILY = KINETIS +MCU_SERIES = K20x + +# Linker script to use +# - it should exist either in <chibios>/os/common/ports/ARMCMx/compilers/GCC/ld/ +# or <this_dir>/ld/ +# - NOTE: a custom ld script is needed for EEPROM on Teensy LC +# - LDSCRIPT = +# - MKL26Z64 for Teensy LC +# - MK20DX128 for Teensy 3.0 +# - MK20DX256 for Teensy 3.1 and 3.2 +MCU_LDSCRIPT = MK20DX256 + +# Startup code to use +# - it should exist in <chibios>/os/common/ports/ARMCMx/compilers/GCC/mk/ +# - STARTUP = +# - kl2x for Teensy LC +# - k20x5 for Teensy 3.0 +# - k20x7 for Teensy 3.1 and 3.2 +MCU_STARTUP = k20x7 + +# Board: it should exist either in <chibios>/os/hal/boards/ +# or <this_dir>/boards +# - BOARD = +# - PJRC_TEENSY_LC for Teensy LC +# - PJRC_TEENSY_3 for Teensy 3.0 +# - PJRC_TEENSY_3_1 for Teensy 3.1 or 3.2 +BOARD = PJRC_TEENSY_3_1 + +# Cortex version +# Teensy LC is cortex-m0plus; Teensy 3.x are cortex-m4 +MCU = cortex-m4 + +# ARM version, CORTEX-M0/M1 are 6, CORTEX-M3/M4/M7 are 7 +# I.e. 6 for Teensy LC; 7 for Teensy 3.x +ARMV = 7 diff --git a/keyboards/handwired/onekey/teensy_lc/chconf.h b/keyboards/handwired/onekey/teensy_lc/chconf.h new file mode 100644 index 0000000000..3294ac7eee --- /dev/null +++ b/keyboards/handwired/onekey/teensy_lc/chconf.h @@ -0,0 +1,524 @@ +/* + ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +/** + * @file templates/chconf.h + * @brief Configuration file template. + * @details A copy of this file must be placed in each project directory, it + * contains the application specific kernel settings. + * + * @addtogroup config + * @details Kernel related settings and hooks. + * @{ + */ + +#ifndef CHCONF_H +#define CHCONF_H + +#define _CHIBIOS_RT_CONF_ + +/*===========================================================================*/ +/** + * @name System timers settings + * @{ + */ +/*===========================================================================*/ + +/** + * @brief System time counter resolution. + * @note Allowed values are 16 or 32 bits. + */ +#define CH_CFG_ST_RESOLUTION 32 + +/** + * @brief System tick frequency. + * @details Frequency of the system timer that drives the system ticks. This + * setting also defines the system tick time unit. + */ +#define CH_CFG_ST_FREQUENCY 1000 + +/** + * @brief Time delta constant for the tick-less mode. + * @note If this value is zero then the system uses the classic + * periodic tick. This value represents the minimum number + * of ticks that is safe to specify in a timeout directive. + * The value one is not valid, timeouts are rounded up to + * this value. + */ +#define CH_CFG_ST_TIMEDELTA 0 + +/** @} */ + +/*===========================================================================*/ +/** + * @name Kernel parameters and options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Round robin interval. + * @details This constant is the number of system ticks allowed for the + * threads before preemption occurs. Setting this value to zero + * disables the preemption for threads with equal priority and the + * round robin becomes cooperative. Note that higher priority + * threads can still preempt, the kernel is always preemptive. + * @note Disabling the round robin preemption makes the kernel more compact + * and generally faster. + * @note The round robin preemption is not supported in tickless mode and + * must be set to zero in that case. + */ +#define CH_CFG_TIME_QUANTUM 20 + +/** + * @brief Managed RAM size. + * @details Size of the RAM area to be managed by the OS. If set to zero + * then the whole available RAM is used. The core memory is made + * available to the heap allocator and/or can be used directly through + * the simplified core memory allocator. + * + * @note In order to let the OS manage the whole RAM the linker script must + * provide the @p __heap_base__ and @p __heap_end__ symbols. + * @note Requires @p CH_CFG_USE_MEMCORE. + */ +#define CH_CFG_MEMCORE_SIZE 0 + +/** + * @brief Idle thread automatic spawn suppression. + * @details When this option is activated the function @p chSysInit() + * does not spawn the idle thread. The application @p main() + * function becomes the idle thread and must implement an + * infinite loop. + */ +#define CH_CFG_NO_IDLE_THREAD FALSE + +/* Use __WFI in the idle thread for waiting. Does lower the power + * consumption. */ +#define CORTEX_ENABLE_WFI_IDLE TRUE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Performance options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief OS optimization. + * @details If enabled then time efficient rather than space efficient code + * is used when two possible implementations exist. + * + * @note This is not related to the compiler optimization options. + * @note The default is @p TRUE. + */ +#define CH_CFG_OPTIMIZE_SPEED TRUE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Subsystem options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Time Measurement APIs. + * @details If enabled then the time measurement APIs are included in + * the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_TM FALSE + +/** + * @brief Threads registry APIs. + * @details If enabled then the registry APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_REGISTRY TRUE + +/** + * @brief Threads synchronization APIs. + * @details If enabled then the @p chThdWait() function is included in + * the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_WAITEXIT TRUE + +/** + * @brief Semaphores APIs. + * @details If enabled then the Semaphores APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_SEMAPHORES TRUE + +/** + * @brief Semaphores queuing mode. + * @details If enabled then the threads are enqueued on semaphores by + * priority rather than in FIFO order. + * + * @note The default is @p FALSE. Enable this if you have special + * requirements. + * @note Requires @p CH_CFG_USE_SEMAPHORES. + */ +#define CH_CFG_USE_SEMAPHORES_PRIORITY FALSE + +/** + * @brief Mutexes APIs. + * @details If enabled then the mutexes APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MUTEXES TRUE + +/** + * @brief Enables recursive behavior on mutexes. + * @note Recursive mutexes are heavier and have an increased + * memory footprint. + * + * @note The default is @p FALSE. + * @note Requires @p CH_CFG_USE_MUTEXES. + */ +#define CH_CFG_USE_MUTEXES_RECURSIVE FALSE + +/** + * @brief Conditional Variables APIs. + * @details If enabled then the conditional variables APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_MUTEXES. + */ +#define CH_CFG_USE_CONDVARS TRUE + +/** + * @brief Conditional Variables APIs with timeout. + * @details If enabled then the conditional variables APIs with timeout + * specification are included in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_CONDVARS. + */ +#define CH_CFG_USE_CONDVARS_TIMEOUT TRUE + +/** + * @brief Events Flags APIs. + * @details If enabled then the event flags APIs are included in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_EVENTS TRUE + +/** + * @brief Events Flags APIs with timeout. + * @details If enabled then the events APIs with timeout specification + * are included in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_EVENTS. + */ +#define CH_CFG_USE_EVENTS_TIMEOUT TRUE + +/** + * @brief Synchronous Messages APIs. + * @details If enabled then the synchronous messages APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MESSAGES TRUE + +/** + * @brief Synchronous Messages queuing mode. + * @details If enabled then messages are served by priority rather than in + * FIFO order. + * + * @note The default is @p FALSE. Enable this if you have special + * requirements. + * @note Requires @p CH_CFG_USE_MESSAGES. + */ +#define CH_CFG_USE_MESSAGES_PRIORITY FALSE + +/** + * @brief Mailboxes APIs. + * @details If enabled then the asynchronous messages (mailboxes) APIs are + * included in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_SEMAPHORES. + */ +#define CH_CFG_USE_MAILBOXES TRUE + +/** + * @brief Core Memory Manager APIs. + * @details If enabled then the core memory manager APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MEMCORE TRUE + +/** + * @brief Heap Allocator APIs. + * @details If enabled then the memory heap allocator APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_MEMCORE and either @p CH_CFG_USE_MUTEXES or + * @p CH_CFG_USE_SEMAPHORES. + * @note Mutexes are recommended. + */ +#define CH_CFG_USE_HEAP TRUE + +/** + * @brief Memory Pools Allocator APIs. + * @details If enabled then the memory pools allocator APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + */ +#define CH_CFG_USE_MEMPOOLS TRUE + +/** + * @brief Dynamic Threads APIs. + * @details If enabled then the dynamic threads creation APIs are included + * in the kernel. + * + * @note The default is @p TRUE. + * @note Requires @p CH_CFG_USE_WAITEXIT. + * @note Requires @p CH_CFG_USE_HEAP and/or @p CH_CFG_USE_MEMPOOLS. + */ +#define CH_CFG_USE_DYNAMIC TRUE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Debug options + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Debug option, kernel statistics. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_STATISTICS FALSE + +/** + * @brief Debug option, system state check. + * @details If enabled the correct call protocol for system APIs is checked + * at runtime. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_SYSTEM_STATE_CHECK TRUE + +/** + * @brief Debug option, parameters checks. + * @details If enabled then the checks on the API functions input + * parameters are activated. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_ENABLE_CHECKS TRUE + +/** + * @brief Debug option, consistency checks. + * @details If enabled then all the assertions in the kernel code are + * activated. This includes consistency checks inside the kernel, + * runtime anomalies and port-defined checks. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_ENABLE_ASSERTS TRUE + +/** + * @brief Debug option, trace buffer. + * @details If enabled then the trace buffer is activated. + * + * @note The default is @p CH_DBG_TRACE_MASK_DISABLED. + */ +#define CH_DBG_TRACE_MASK CH_DBG_TRACE_MASK_DISABLED + +/** + * @brief Trace buffer entries. + * @note The trace buffer is only allocated if @p CH_DBG_TRACE_MASK is + * different from @p CH_DBG_TRACE_MASK_DISABLED. + */ +#define CH_DBG_TRACE_BUFFER_SIZE 128 + +/** + * @brief Debug option, stack checks. + * @details If enabled then a runtime stack check is performed. + * + * @note The default is @p FALSE. + * @note The stack check is performed in a architecture/port dependent way. + * It may not be implemented or some ports. + * @note The default failure mode is to halt the system with the global + * @p panic_msg variable set to @p NULL. + */ +#define CH_DBG_ENABLE_STACK_CHECK TRUE + +/** + * @brief Debug option, stacks initialization. + * @details If enabled then the threads working area is filled with a byte + * value when a thread is created. This can be useful for the + * runtime measurement of the used stack. + * + * @note The default is @p FALSE. + */ +#define CH_DBG_FILL_THREADS TRUE + +/** + * @brief Debug option, threads profiling. + * @details If enabled then a field is added to the @p thread_t structure that + * counts the system ticks occurred while executing the thread. + * + * @note The default is @p FALSE. + * @note This debug option is not currently compatible with the + * tickless mode. + */ +#define CH_DBG_THREADS_PROFILING FALSE + +/** @} */ + +/*===========================================================================*/ +/** + * @name Kernel hooks + * @{ + */ +/*===========================================================================*/ + +/** + * @brief Threads descriptor structure extension. + * @details User fields added to the end of the @p thread_t structure. + */ +#define CH_CFG_THREAD_EXTRA_FIELDS \ + /* Add threads custom fields here.*/ + +/** + * @brief Threads initialization hook. + * @details User initialization code added to the @p chThdInit() API. + * + * @note It is invoked from within @p chThdInit() and implicitly from all + * the threads creation APIs. + */ +#define CH_CFG_THREAD_INIT_HOOK(tp) { \ + /* Add threads initialization code here.*/ \ +} + +/** + * @brief Threads finalization hook. + * @details User finalization code added to the @p chThdExit() API. + */ +#define CH_CFG_THREAD_EXIT_HOOK(tp) { \ + /* Add threads finalization code here.*/ \ +} + +/** + * @brief Context switch hook. + * @details This hook is invoked just before switching between threads. + */ +#define CH_CFG_CONTEXT_SWITCH_HOOK(ntp, otp) { \ + /* Context switch code here.*/ \ +} + +/** + * @brief ISR enter hook. + */ +#define CH_CFG_IRQ_PROLOGUE_HOOK() { \ + /* IRQ prologue code here.*/ \ +} + +/** + * @brief ISR exit hook. + */ +#define CH_CFG_IRQ_EPILOGUE_HOOK() { \ + /* IRQ epilogue code here.*/ \ +} + +/** + * @brief Idle thread enter hook. + * @note This hook is invoked within a critical zone, no OS functions + * should be invoked from here. + * @note This macro can be used to activate a power saving mode. + */ +#define CH_CFG_IDLE_ENTER_HOOK() { \ + /* Idle-enter code here.*/ \ +} + +/** + * @brief Idle thread leave hook. + * @note This hook is invoked within a critical zone, no OS functions + * should be invoked from here. + * @note This macro can be used to deactivate a power saving mode. + */ +#define CH_CFG_IDLE_LEAVE_HOOK() { \ + /* Idle-leave code here.*/ \ +} + +/** + * @brief Idle Loop hook. + * @details This hook is continuously invoked by the idle thread loop. + */ +#define CH_CFG_IDLE_LOOP_HOOK() { \ + /* Idle loop code here.*/ \ +} + +/** + * @brief System tick event hook. + * @details This hook is invoked in the system tick handler immediately + * after processing the virtual timers queue. + */ +#define CH_CFG_SYSTEM_TICK_HOOK() { \ + /* System tick event code here.*/ \ +} + +/** + * @brief System halt hook. + * @details This hook is invoked in case to a system halting error before + * the system is halted. + */ +#define CH_CFG_SYSTEM_HALT_HOOK(reason) { \ + /* System halt code here.*/ \ +} + +/** + * @brief Trace hook. + * @details This hook is invoked each time a new record is written in the + * trace buffer. + */ +#define CH_CFG_TRACE_HOOK(tep) { \ + /* Trace code here.*/ \ +} + +/** @} */ + +/*===========================================================================*/ +/* Port-specific settings (override port settings defaulted in chcore.h). */ +/*===========================================================================*/ + +#endif /* CHCONF_H */ + +/** @} */ diff --git a/keyboards/handwired/onekey/teensy_lc/config.h b/keyboards/handwired/onekey/teensy_lc/config.h new file mode 100644 index 0000000000..0d82a05786 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_lc/config.h @@ -0,0 +1,24 @@ +/* Copyright 2019 + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +// TODO: including this causes "error: expected identifier before '(' token" errors +//#include "config_common.h" + +#define MATRIX_COL_PINS { D5 } +#define MATRIX_ROW_PINS { B2 } +#define UNUSED_PINS diff --git a/keyboards/handwired/onekey/teensy_lc/halconf.h b/keyboards/handwired/onekey/teensy_lc/halconf.h new file mode 100644 index 0000000000..1b6f2adc20 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_lc/halconf.h @@ -0,0 +1,354 @@ +/* + ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +/** + * @file templates/halconf.h + * @brief HAL configuration header. + * @details HAL configuration file, this file allows to enable or disable the + * various device drivers from your application. You may also use + * this file in order to override the device drivers default settings. + * + * @addtogroup HAL_CONF + * @{ + */ + +#ifndef _HALCONF_H_ +#define _HALCONF_H_ + +#include "mcuconf.h" + +/** + * @brief Enables the PAL subsystem. + */ +#if !defined(HAL_USE_PAL) || defined(__DOXYGEN__) +#define HAL_USE_PAL TRUE +#endif + +/** + * @brief Enables the ADC subsystem. + */ +#if !defined(HAL_USE_ADC) || defined(__DOXYGEN__) +#define HAL_USE_ADC FALSE +#endif + +/** + * @brief Enables the CAN subsystem. + */ +#if !defined(HAL_USE_CAN) || defined(__DOXYGEN__) +#define HAL_USE_CAN FALSE +#endif + +/** + * @brief Enables the DAC subsystem. + */ +#if !defined(HAL_USE_DAC) || defined(__DOXYGEN__) +#define HAL_USE_DAC FALSE +#endif + +/** + * @brief Enables the EXT subsystem. + */ +#if !defined(HAL_USE_EXT) || defined(__DOXYGEN__) +#define HAL_USE_EXT FALSE +#endif + +/** + * @brief Enables the GPT subsystem. + */ +#if !defined(HAL_USE_GPT) || defined(__DOXYGEN__) +#define HAL_USE_GPT FALSE +#endif + +/** + * @brief Enables the I2C subsystem. + */ +#if !defined(HAL_USE_I2C) || defined(__DOXYGEN__) +#define HAL_USE_I2C FALSE +#endif + +/** + * @brief Enables the I2S subsystem. + */ +#if !defined(HAL_USE_I2S) || defined(__DOXYGEN__) +#define HAL_USE_I2S FALSE +#endif + +/** + * @brief Enables the ICU subsystem. + */ +#if !defined(HAL_USE_ICU) || defined(__DOXYGEN__) +#define HAL_USE_ICU FALSE +#endif + +/** + * @brief Enables the MAC subsystem. + */ +#if !defined(HAL_USE_MAC) || defined(__DOXYGEN__) +#define HAL_USE_MAC FALSE +#endif + +/** + * @brief Enables the MMC_SPI subsystem. + */ +#if !defined(HAL_USE_MMC_SPI) || defined(__DOXYGEN__) +#define HAL_USE_MMC_SPI FALSE +#endif + +/** + * @brief Enables the PWM subsystem. + */ +#if !defined(HAL_USE_PWM) || defined(__DOXYGEN__) +#define HAL_USE_PWM FALSE +#endif + +/** + * @brief Enables the RTC subsystem. + */ +#if !defined(HAL_USE_RTC) || defined(__DOXYGEN__) +#define HAL_USE_RTC FALSE +#endif + +/** + * @brief Enables the SDC subsystem. + */ +#if !defined(HAL_USE_SDC) || defined(__DOXYGEN__) +#define HAL_USE_SDC FALSE +#endif + +/** + * @brief Enables the SERIAL subsystem. + */ +#if !defined(HAL_USE_SERIAL) || defined(__DOXYGEN__) +#define HAL_USE_SERIAL FALSE +#endif + +/** + * @brief Enables the SERIAL over USB subsystem. + */ +#if !defined(HAL_USE_SERIAL_USB) || defined(__DOXYGEN__) +#define HAL_USE_SERIAL_USB FALSE +#endif + +/** + * @brief Enables the SPI subsystem. + */ +#if !defined(HAL_USE_SPI) || defined(__DOXYGEN__) +#define HAL_USE_SPI FALSE +#endif + +/** + * @brief Enables the UART subsystem. + */ +#if !defined(HAL_USE_UART) || defined(__DOXYGEN__) +#define HAL_USE_UART FALSE +#endif + +/** + * @brief Enables the USB subsystem. + */ +#if !defined(HAL_USE_USB) || defined(__DOXYGEN__) +#define HAL_USE_USB TRUE +#endif + +/** + * @brief Enables the WDG subsystem. + */ +#if !defined(HAL_USE_WDG) || defined(__DOXYGEN__) +#define HAL_USE_WDG FALSE +#endif + +/*===========================================================================*/ +/* ADC driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables synchronous APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(ADC_USE_WAIT) || defined(__DOXYGEN__) +#define ADC_USE_WAIT TRUE +#endif + +/** + * @brief Enables the @p adcAcquireBus() and @p adcReleaseBus() APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(ADC_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) +#define ADC_USE_MUTUAL_EXCLUSION TRUE +#endif + +/*===========================================================================*/ +/* CAN driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Sleep mode related APIs inclusion switch. + */ +#if !defined(CAN_USE_SLEEP_MODE) || defined(__DOXYGEN__) +#define CAN_USE_SLEEP_MODE TRUE +#endif + +/*===========================================================================*/ +/* I2C driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables the mutual exclusion APIs on the I2C bus. + */ +#if !defined(I2C_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) +#define I2C_USE_MUTUAL_EXCLUSION TRUE +#endif + +/*===========================================================================*/ +/* MAC driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables an event sources for incoming packets. + */ +#if !defined(MAC_USE_ZERO_COPY) || defined(__DOXYGEN__) +#define MAC_USE_ZERO_COPY FALSE +#endif + +/** + * @brief Enables an event sources for incoming packets. + */ +#if !defined(MAC_USE_EVENTS) || defined(__DOXYGEN__) +#define MAC_USE_EVENTS TRUE +#endif + +/*===========================================================================*/ +/* MMC_SPI driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Delays insertions. + * @details If enabled this options inserts delays into the MMC waiting + * routines releasing some extra CPU time for the threads with + * lower priority, this may slow down the driver a bit however. + * This option is recommended also if the SPI driver does not + * use a DMA channel and heavily loads the CPU. + */ +#if !defined(MMC_NICE_WAITING) || defined(__DOXYGEN__) +#define MMC_NICE_WAITING TRUE +#endif + +/*===========================================================================*/ +/* SDC driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Number of initialization attempts before rejecting the card. + * @note Attempts are performed at 10mS intervals. + */ +#if !defined(SDC_INIT_RETRY) || defined(__DOXYGEN__) +#define SDC_INIT_RETRY 100 +#endif + +/** + * @brief Include support for MMC cards. + * @note MMC support is not yet implemented so this option must be kept + * at @p FALSE. + */ +#if !defined(SDC_MMC_SUPPORT) || defined(__DOXYGEN__) +#define SDC_MMC_SUPPORT FALSE +#endif + +/** + * @brief Delays insertions. + * @details If enabled this options inserts delays into the MMC waiting + * routines releasing some extra CPU time for the threads with + * lower priority, this may slow down the driver a bit however. + */ +#if !defined(SDC_NICE_WAITING) || defined(__DOXYGEN__) +#define SDC_NICE_WAITING TRUE +#endif + +/*===========================================================================*/ +/* SERIAL driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Default bit rate. + * @details Configuration parameter, this is the baud rate selected for the + * default configuration. + */ +#if !defined(SERIAL_DEFAULT_BITRATE) || defined(__DOXYGEN__) +#define SERIAL_DEFAULT_BITRATE 38400 +#endif + +/** + * @brief Serial buffers size. + * @details Configuration parameter, you can change the depth of the queue + * buffers depending on the requirements of your application. + * @note The default is 64 bytes for both the transmission and receive + * buffers. + */ +#if !defined(SERIAL_BUFFERS_SIZE) || defined(__DOXYGEN__) +#define SERIAL_BUFFERS_SIZE 16 +#endif + +/*===========================================================================*/ +/* SERIAL_USB driver related setting. */ +/*===========================================================================*/ + +/** + * @brief Serial over USB buffers size. + * @details Configuration parameter, the buffer size must be a multiple of + * the USB data endpoint maximum packet size. + * @note The default is 64 bytes for both the transmission and receive + * buffers. + */ +#if !defined(SERIAL_USB_BUFFERS_SIZE) || defined(__DOXYGEN__) +#define SERIAL_USB_BUFFERS_SIZE 1 +#endif + +/*===========================================================================*/ +/* SPI driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables synchronous APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(SPI_USE_WAIT) || defined(__DOXYGEN__) +#define SPI_USE_WAIT TRUE +#endif + +/** + * @brief Enables the @p spiAcquireBus() and @p spiReleaseBus() APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(SPI_USE_MUTUAL_EXCLUSION) || defined(__DOXYGEN__) +#define SPI_USE_MUTUAL_EXCLUSION TRUE +#endif + +/*===========================================================================*/ +/* USB driver related settings. */ +/*===========================================================================*/ + +/** + * @brief Enables synchronous APIs. + * @note Disabling this option saves both code and data space. + */ +#if !defined(USB_USE_WAIT) || defined(__DOXYGEN__) +#define USB_USE_WAIT TRUE +#endif + +#endif /* _HALCONF_H_ */ + +/** @} */ + diff --git a/keyboards/handwired/onekey/teensy_lc/ld/MKL26Z64.ld b/keyboards/handwired/onekey/teensy_lc/ld/MKL26Z64.ld new file mode 100644 index 0000000000..c4ca8b874c --- /dev/null +++ b/keyboards/handwired/onekey/teensy_lc/ld/MKL26Z64.ld @@ -0,0 +1,105 @@ +/* + * Copyright (C) 2013-2016 Fabio Utzig, http://fabioutzig.com + * (C) 2016 flabbergast <s3+flabbergast@sdfeu.org> + * + * Permission is hereby granted, free of charge, to any person obtaining + * a copy of this software and associated documentation files (the "Software"), + * to deal in the Software without restriction, including without limitation + * the rights to use, copy, modify, merge, publish, distribute, sublicense, + * and/or sell copies of the Software, and to permit persons to whom the + * Software is furnished to do so, subject to the following conditions: + * + * The above copyright notice and this permission notice shall be included in + * all copies or substantial portions of the Software. + * + * THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS + * OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, + * FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE + * AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER + * LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, + * OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE + * SOFTWARE. + */ + +/* + * KL26Z64 memory setup. + */ +MEMORY +{ + flash0 : org = 0x00000000, len = 0x100 + flash1 : org = 0x00000400, len = 0x10 + flash2 : org = 0x00000410, len = 62k - 0x410 + flash3 : org = 0x0000F800, len = 2k + flash4 : org = 0x00000000, len = 0 + flash5 : org = 0x00000000, len = 0 + flash6 : org = 0x00000000, len = 0 + flash7 : org = 0x00000000, len = 0 + ram0 : org = 0x1FFFF800, len = 8k + ram1 : org = 0x00000000, len = 0 + ram2 : org = 0x00000000, len = 0 + ram3 : org = 0x00000000, len = 0 + ram4 : org = 0x00000000, len = 0 + ram5 : org = 0x00000000, len = 0 + ram6 : org = 0x00000000, len = 0 + ram7 : org = 0x00000000, len = 0 +} + +/* Flash region for the configuration bytes.*/ +SECTIONS +{ + .cfmprotect : ALIGN(4) SUBALIGN(4) + { + KEEP(*(.cfmconfig)) + } > flash1 +} + +/* For each data/text section two region are defined, a virtual region + and a load region (_LMA suffix).*/ + +/* Flash region to be used for exception vectors.*/ +REGION_ALIAS("VECTORS_FLASH", flash0); +REGION_ALIAS("VECTORS_FLASH_LMA", flash0); + +/* Flash region to be used for constructors and destructors.*/ +REGION_ALIAS("XTORS_FLASH", flash2); +REGION_ALIAS("XTORS_FLASH_LMA", flash2); + +/* Flash region to be used for code text.*/ +REGION_ALIAS("TEXT_FLASH", flash2); +REGION_ALIAS("TEXT_FLASH_LMA", flash2); + +/* Flash region to be used for read only data.*/ +REGION_ALIAS("RODATA_FLASH", flash2); +REGION_ALIAS("RODATA_FLASH_LMA", flash2); + +/* Flash region to be used for various.*/ +REGION_ALIAS("VARIOUS_FLASH", flash2); +REGION_ALIAS("VARIOUS_FLASH_LMA", flash2); + +/* Flash region to be used for RAM(n) initialization data.*/ +REGION_ALIAS("RAM_INIT_FLASH_LMA", flash2); + +/* RAM region to be used for Main stack. This stack accommodates the processing + of all exceptions and interrupts.*/ +REGION_ALIAS("MAIN_STACK_RAM", ram0); + +/* RAM region to be used for the process stack. This is the stack used by + the main() function.*/ +REGION_ALIAS("PROCESS_STACK_RAM", ram0); + +/* RAM region to be used for data segment.*/ +REGION_ALIAS("DATA_RAM", ram0); +REGION_ALIAS("DATA_RAM_LMA", flash2); + +/* RAM region to be used for BSS segment.*/ +REGION_ALIAS("BSS_RAM", ram0); + +/* RAM region to be used for the default heap.*/ +REGION_ALIAS("HEAP_RAM", ram0); + +__eeprom_workarea_start__ = ORIGIN(flash3); +__eeprom_workarea_size__ = LENGTH(flash3); +__eeprom_workarea_end__ = __eeprom_workarea_start__ + __eeprom_workarea_size__; + +/* Generic rules inclusion.*/ +INCLUDE rules.ld diff --git a/keyboards/handwired/onekey/teensy_lc/mcuconf.h b/keyboards/handwired/onekey/teensy_lc/mcuconf.h new file mode 100644 index 0000000000..ea576df5bc --- /dev/null +++ b/keyboards/handwired/onekey/teensy_lc/mcuconf.h @@ -0,0 +1,45 @@ +/* + ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio + + Licensed under the Apache License, Version 2.0 (the "License"); + you may not use this file except in compliance with the License. + You may obtain a copy of the License at + + http://www.apache.org/licenses/LICENSE-2.0 + + Unless required by applicable law or agreed to in writing, software + distributed under the License is distributed on an "AS IS" BASIS, + WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. + See the License for the specific language governing permissions and + limitations under the License. +*/ + +#ifndef _MCUCONF_H_ +#define _MCUCONF_H_ + +#define KL2x_MCUCONF + +/* + * HAL driver system settings. + */ +/* PEE mode - 48MHz system clock driven by (16 MHz) external crystal. */ +#define KINETIS_MCG_MODE KINETIS_MCG_MODE_PEE +#define KINETIS_PLLCLK_FREQUENCY 96000000UL +#define KINETIS_SYSCLK_FREQUENCY 48000000UL + +/* + * SERIAL driver system settings. + */ +#define KINETIS_SERIAL_USE_UART0 TRUE + +/* + * USB driver settings + */ +#define KINETIS_USB_USE_USB0 TRUE + +/* Need to redefine this, since the default (configured for K20x) might not apply + * 2 for Teensy LC + * 5 for Teensy 3.x */ +#define KINETIS_USB_USB0_IRQ_PRIORITY 2 + +#endif /* _MCUCONF_H_ */ diff --git a/keyboards/handwired/onekey/teensy_lc/readme.md b/keyboards/handwired/onekey/teensy_lc/readme.md new file mode 100644 index 0000000000..676d794d87 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_lc/readme.md @@ -0,0 +1,40 @@ +# Teensy LC onekey + +To trigger keypress, short together pins *D5* and *B2* (marked on the PCB as *20* and *19*). + +## Hardware + +### Pins +When setting matrix pins, you need to use the MCU definitions instead of what is printed on the PCB. Sourced from <https://www.pjrc.com/teensy/schematic_lc.gif>. The following table can be used to convert between the two. + +| PCB | MCU | Notes | +|------- |-----|-------| +| 0 | B16 | | +| 1 | B17 | | +| 2 | D0 | | +| 3 | A1 | | +| 4 | A2 | | +| 5 | D7 | | +| 6 | D4 | | +| 7 | D2 | | +| 8 | D3 | | +| 9 | C3 | | +| 10 | C4 | | +| 11 | C6 | | +| 12 | C7 | | +| 13/LED | C5 | | +| 14/A0 | D1 | | +| 15/A1 | C0 | | +| 16/A2 | B0 | | +| 17/A3 | B1 | | +| 18/A4 | B3 | | +| 19/A5 | B2 | | +| 20/A6 | D5 | | +| 21/A7 | D6 | | +| 22/A8 | C1 | | +| 23/A9 | C2 | | +| 24/A10 | E2 | | +| 25/A11 | E21 | *[1]* | +| 26/A12 | E30 | *[1]* | + +*[1]* - Currently not configured and may require extra work to implement. diff --git a/keyboards/handwired/onekey/teensy_lc/rules.mk b/keyboards/handwired/onekey/teensy_lc/rules.mk new file mode 100644 index 0000000000..7859f6d741 --- /dev/null +++ b/keyboards/handwired/onekey/teensy_lc/rules.mk @@ -0,0 +1,41 @@ +## chip/board settings +# - the next two should match the directories in +# <chibios>/os/hal/ports/$(MCU_FAMILY)/$(MCU_SERIES) +# - For Teensies, FAMILY = KINETIS and SERIES is either +# KL2x (LC) or K20x (3.0,3.1,3.2). +MCU_FAMILY = KINETIS +MCU_SERIES = KL2x + +# Linker script to use +# - it should exist either in <chibios>/os/common/ports/ARMCMx/compilers/GCC/ld/ +# or <this_dir>/ld/ +# - NOTE: a custom ld script is needed for EEPROM on Teensy LC +# - LDSCRIPT = +# - MKL26Z64 for Teensy LC +# - MK20DX128 for Teensy 3.0 +# - MK20DX256 for Teensy 3.1 and 3.2 +MCU_LDSCRIPT = MKL26Z64 + +# Startup code to use +# - it should exist in <chibios>/os/common/ports/ARMCMx/compilers/GCC/mk/ +# - STARTUP = +# - kl2x for Teensy LC +# - k20x5 for Teensy 3.0 +# - k20x7 for Teensy 3.1 and 3.2 +MCU_STARTUP = kl2x + +# Board: it should exist either in <chibios>/os/hal/boards/ +# or <this_dir>/boards +# - BOARD = +# - PJRC_TEENSY_LC for Teensy LC +# - PJRC_TEENSY_3 for Teensy 3.0 +# - PJRC_TEENSY_3_1 for Teensy 3.1 or 3.2 +BOARD = PJRC_TEENSY_LC + +# Cortex version +# Teensy LC is cortex-m0plus; Teensy 3.x are cortex-m4 +MCU = cortex-m0plus + +# ARM version, CORTEX-M0/M1 are 6, CORTEX-M3/M4/M7 are 7 +# I.e. 6 for Teensy LC; 7 for Teensy 3.x +ARMV = 6 diff --git a/keyboards/handwired/tritium_numpad/config.h b/keyboards/handwired/tritium_numpad/config.h new file mode 100644 index 0000000000..83333c0fb7 --- /dev/null +++ b/keyboards/handwired/tritium_numpad/config.h @@ -0,0 +1,83 @@ +/* +Copyright 2012 Jun Wako <wakojun@gmail.com> + +This program is free software: you can redistribute it and/or modify +it under the terms of the GNU General Public License as published by +the Free Software Foundation, either version 2 of the License, or +(at your option) any later version. + +This program is distributed in the hope that it will be useful, +but WITHOUT ANY WARRANTY; without even the implied warranty of +MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the +GNU General Public License for more details. + +You should have received a copy of the GNU General Public License +along with this program. If not, see <http://www.gnu.org/licenses/>. +*/ + +#pragma once + +#include "config_common.h" + +/* USB Device descriptor parameter */ +#define VENDOR_ID 0xFEED +#define PRODUCT_ID 0x6060 +#define DEVICE_VER 0x0003 +#define MANUFACTURER Handwired +#define PRODUCT Tritium Numpad +#define DESCRIPTION QMK keyboard firmware for handwired numpad + +/* key matrix size */ +#define MATRIX_ROWS 6 +#define MATRIX_COLS 4 + +// ROWS: Top to bottom, COLS: Left to right + +#define MATRIX_ROW_PINS { D1, D0, D4, C6, D7, E6 } +#define MATRIX_COL_PINS { F4, F6, B1, B2 } +#define UNUSED_PINS + +#define BACKLIGHT_PIN B6 + +/* COL2ROW or ROW2COL */ +#define DIODE_DIRECTION COL2ROW + +/* define if matrix has ghost */ +//#define MATRIX_HAS_GHOST + +/* Set 0 if debouncing isn't needed */ +#define DEBOUNCE 5 + +/* Mechanical locking support. Use KC_LCAP, KC_LNUM or KC_LSCR instead in keymap */ +#define LOCKING_SUPPORT_ENABLE +/* Locking resynchronize hack */ +#define LOCKING_RESYNC_ENABLE + +/* Backlight configuration + */ +#define BACKLIGHT_LEVELS 4 + +/* Underlight configuration + */ + +#define RGB_DI_PIN D2 +#define RGBLED_NUM 4 // Number of LEDs + +/* + * Feature disable options + * These options are also useful to firmware size reduction. + */ + +/* disable debug print */ +//#define NO_DEBUG + +/* disable print */ +//#define NO_PRINT + +/* disable action features */ +//#define NO_ACTION_LAYER +//#define NO_ACTION_TAPPING +//#define NO_ACTION_ONESHOT +//#define NO_ACTION_MACRO +//#define NO_ACTION_FUNCTION + diff --git a/keyboards/handwired/tritium_numpad/info.json b/keyboards/handwired/tritium_numpad/info.json new file mode 100644 index 0000000000..bc10efc821 --- /dev/null +++ b/keyboards/handwired/tritium_numpad/info.json @@ -0,0 +1,21 @@ +{ + "keyboard_name": "Tritium_numpad", + "url": "https://www.thingiverse.com/thing:2855938", + "maintainer": "qmk", + "width": 4, + "height": 6, + "layouts": { + "LAYOUT_numpad_6x4": { + "key_count": 21, + "layout": [{"label":"k00", "x":0, "y":0}, {"label":"k01", "x":1, "y":0}, {"label":"k02", "x":2, "y":0}, {"label":"k03", "x":3, "y":0}, {"label":"k10", "x":0, "y":1}, {"label":"k11", "x":1, "y":1}, {"label":"k12", "x":2, "y":1}, {"label":"k13", "x":3, "y":1}, {"label":"k20", "x":0, "y":2}, {"label":"k21", "x":1, "y":2}, {"label":"k22", "x":2, "y":2}, {"label":"k30", "x":0, "y":3}, {"label":"k31", "x":1, "y":3}, {"label":"k32", "x":2, "y":3}, {"label":"k23", "x":3, "y":2, "h":2}, {"label":"k40", "x":0, "y":4}, {"label":"k41", "x":1, "y":4}, {"label":"k42", "x":2, "y":4}, {"label":"k50", "x":0, "y":5, "w":2}, {"label":"k52", "x":2, "y":5}, {"label":"k43", "x":3, "y":4, "h":2}] + }, + "LAYOUT_nontra_6x4": { + "key_count": 22, + "layout": [{"label":"k00", "x":0, "y":0}, {"label":"k01", "x":1, "y":0}, {"label":"k02", "x":2, "y":0}, {"label":"k03", "x":3, "y":0}, {"label":"k10", "x":0, "y":1}, {"label":"k11", "x":1, "y":1}, {"label":"k12", "x":2, "y":1}, {"label":"k13", "x":3, "y":1}, {"label":"k20", "x":0, "y":2}, {"label":"k21", "x":1, "y":2}, {"label":"k22", "x":2, "y":2}, {"label":"k23", "x":3, "y":2, "h":2}, {"label":"k30", "x":0, "y":3}, {"label":"k31", "x":1, "y":3}, {"label":"k32", "x":2, "y":3}, {"label":"k40", "x":0, "y":4}, {"label":"k41", "x":1, "y":4}, {"label":"k42", "x":2, "y":4}, {"label":"k43", "x":3, "y":4, "h":2}, {"label":"k50", "x":0, "y":5}, {"label":"k51", "x":1, "y":5}, {"label":"k52", "x":2, "y":5}] + }, + "LAYOUT_ortho_6x4": { + "key_count": 24, + "layout": [{"label":"k00", "x":0, "y":0}, {"label":"k01", "x":1, "y":0}, {"label":"k02", "x":2, "y":0}, {"label":"k03", "x":3, "y":0}, {"label":"k10", "x":0, "y":1}, {"label":"k11", "x":1, "y":1}, {"label":"k12", "x":2, "y":1}, {"label":"k13", "x":3, "y":1}, {"label":"k20", "x":0, "y":2}, {"label":"k21", "x":1, "y":2}, {"label":"k22", "x":2, "y":2}, {"label":"k23", "x":3, "y":2}, {"label":"k30", "x":0, "y":3}, {"label":"k31", "x":1, "y":3}, {"label":"k32", "x":2, "y":3}, {"label":"k33", "x":3, "y":3}, {"label":"k40", "x":0, "y":4}, {"label":"k41", "x":1, "y":4}, {"label":"k42", "x":2, "y":4}, {"label":"k43", "x":3, "y":4}, {"label":"k50", "x":0, "y":5}, {"label":"k51", "x":1, "y":5}, {"label":"k52", "x":2, "y":5}, {"label":"k53", "x":3, "y":5}] + } + } +} diff --git a/keyboards/handwired/tritium_numpad/keymaps/blu/keymap.c b/keyboards/handwired/tritium_numpad/keymaps/blu/keymap.c new file mode 100644 index 0000000000..958c17e428 --- /dev/null +++ b/keyboards/handwired/tritium_numpad/keymaps/blu/keymap.c @@ -0,0 +1,40 @@ +#include QMK_KEYBOARD_H + +void keyboard_pre_init_user(void) +{ + // Set layer LED as an output + setPinOutput(B0); +} + +uint32_t layer_state_set_user(uint32_t state) +{ + // Switch layer LED accordingly + switch (biton32(state)) { + case 0: + writePinHigh(B0); + break; + case 1: + writePinLow(B0); + break; + } + return state; +} + +const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { + [0] = LAYOUT_ortho_6x4( + KC_NLCK, KC_PSLS, KC_PAST, KC_PMNS, + KC_P7, KC_P8, KC_P9, KC_PPLS, + KC_P4, KC_P5, KC_P6, KC_BSPC, + KC_P1, KC_P2, KC_P3, KC_PENT, + KC_P0, KC_UP, KC_PDOT, TT(1), + KC_LEFT, KC_DOWN, KC_RGHT, BL_STEP + ), + [1] = LAYOUT_ortho_6x4( + KC_NO, KC_NO, KC_NO, KC_NO, + KC_NO, KC_K, KC_NO, KC_NO, + KC_H, KC_NO, KC_L, KC_NO, + KC_NO, KC_J, KC_NO, KC_NO, + KC_LSFT, KC_Z, KC_X, KC_TRNS, + KC_NO, KC_NO, KC_NO, KC_NO + ) +}; diff --git a/keyboards/handwired/tritium_numpad/keymaps/blu/layers.json b/keyboards/handwired/tritium_numpad/keymaps/blu/layers.json new file mode 100644 index 0000000000..5335c651fa --- /dev/null +++ b/keyboards/handwired/tritium_numpad/keymaps/blu/layers.json @@ -0,0 +1 @@ +[["KC_NLCK", "KC_PSLS", "KC_PAST", "KC_PMNS", "KC_P7", "KC_P8", "KC_P9", "KC_PPLS", "KC_P4", "KC_P5", "KC_P6", "KC_BSPC", "KC_P1", "KC_P2", "KC_P3", "KC_PENT", "KC_P0", "KC_UP", "KC_PDOT", "TT(1)", "KC_LEFT", "KC_DOWN", "KC_RGHT", "BL_STEP"], ["KC_NO", "KC_NO", "KC_NO", "KC_NO", "KC_NO", "KC_K", "KC_NO", "KC_NO", "KC_H", "KC_NO", "KC_L", "KC_NO", "KC_NO", "KC_J", "KC_NO", "KC_NO", "KC_LSFT", "KC_Z", "KC_X", "KC_TRNS", "KC_NO", "KC_NO", "KC_NO", "KC_NO"]]
\ No newline at end of file diff --git a/keyboards/handwired/tritium_numpad/keymaps/blu/readme.md b/keyboards/handwired/tritium_numpad/keymaps/blu/readme.md new file mode 100644 index 0000000000..fd07b155fb --- /dev/null +++ b/keyboards/handwired/tritium_numpad/keymaps/blu/readme.md @@ -0,0 +1,13 @@ +# Generated Keymap Layout + +This layout was generated by the QMK API. You can find the JSON data used to +generate this keymap in the file layers.json. + +To make use of this file you will need follow the following steps: + +* Download or Clone QMK Firmware: <https://github.com/qmk/qmk_firmware/> +* Extract QMK Firmware to a location on your hard drive +* Copy this folder into %s +* You are now ready to compile or use your keymap with the source + +More information can be found in the QMK docs: <https://docs.qmk.fm>
\ No newline at end of file diff --git a/keyboards/handwired/tritium_numpad/keymaps/default/keymap.c b/keyboards/handwired/tritium_numpad/keymaps/default/keymap.c new file mode 100644 index 0000000000..60430217b9 --- /dev/null +++ b/keyboards/handwired/tritium_numpad/keymaps/default/keymap.c @@ -0,0 +1,59 @@ +#include QMK_KEYBOARD_H + +// Each layer gets a name for readability, which is then used in the keymap matrix below. +// The underscores don't mean anything - you can have a layer called STUFF or any other name. +// Layer names don't all need to be of the same length, obviously, and you can also skip them +// entirely and just use numbers. +#define _BL 0 +#define _FL 1 + +const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { + /* Keymap _BL: (Base Layer) Default Layer + * ,-------------------. + * |Esc |TAB |BS | = | + * |----|----|----|----| + * | NL | / | * | - | + * |----|----|----|----| + * | 7 | 8 | 9 | | + * |----|----|----| + | + * | 4 | 5 | 6 | | + * |----|----|----|----| + * | 1 | 2 | 3 | | + * |----|----|----| En | + * | 0 |./FN| | + * `-------------------' + */ + + [_BL] = LAYOUT_numpad_6x4( + KC_ESC, KC_TAB, KC_BSPC, KC_PEQL, + KC_NLCK, KC_PSLS, KC_PAST, KC_PMNS, + KC_P7, KC_P8, KC_P9, + KC_P4, KC_P5, KC_P6, KC_PPLS, + KC_P1, KC_P2, KC_P3, + KC_P0, LT(_FL,KC_PDOT), KC_PENT + ), + + /* Keymap _FL: Function Layer + * ,-------------------. + * |Esc |TAB |BS | = | + * |----|----|----|----| + * | NL | / | * | - | + * |----|----|----|----| + * | 7 | 8 | 9 | | + * |----|----|----|RST | + * | 4 | 5 | 6 | | + * |----|----|----|----| + * | 1 | 2 | 3 | | + * |----|----|----| En | + * | 0 |./FN| | + * `-------------------' + */ + [_FL] = LAYOUT_numpad_6x4( + KC_ESC, KC_TAB, KC_BSPC, KC_PEQL, + KC_NLCK, KC_PSLS, KC_PAST, KC_PMNS, + KC_P7, KC_P8, KC_P9, + KC_P4, KC_P5, KC_P6, RESET, + KC_P1, KC_P2, KC_P3, + KC_P0, LT(_FL,KC_PDOT), KC_PENT + ), +}; diff --git a/keyboards/handwired/tritium_numpad/keymaps/max/keymap.c b/keyboards/handwired/tritium_numpad/keymaps/max/keymap.c new file mode 100644 index 0000000000..bba5c43bbb --- /dev/null +++ b/keyboards/handwired/tritium_numpad/keymaps/max/keymap.c @@ -0,0 +1,59 @@ +#include QMK_KEYBOARD_H + +// Each layer gets a name for readability, which is then used in the keymap matrix below. +// The underscores don't mean anything - you can have a layer called STUFF or any other name. +// Layer names don't all need to be of the same length, obviously, and you can also skip them +// entirely and just use numbers. +#define _BL 0 +#define _FL 1 + +const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { + /* Keymap _BL: (Base Layer) Default Layer + * ,-------------------. + * |Esc |Setp| - | = | + * |----|----|----|----| + * | F1 | F2 | F3 | F4 | + * |----|----|----|----| + * | 7 | 8 | 9 | - | + * |----|----|----|----| + * | 4 | 5 | 6 | LF | + * |----|----|----|----| + * | 1 | 2 | 3 | \ | + * |----|----|----|----| + * |Left|Down| Up |Rght| + * `-------------------' + */ + + [_BL] = LAYOUT_ortho_6x4( + KC_ESC, KC_TAB, KC_MINS,KC_EQL, + KC_F1, KC_F2, KC_F3, KC_F4, + KC_P7, KC_P8, KC_P9, KC_PMNS, + KC_P4, KC_P5, KC_P6, KC_PENT, + KC_P1, KC_P2, KC_P3, KC_BSLS, + KC_LEFT, KC_DOWN, KC_UP, KC_RIGHT + ), + + /* Keymap _FL: Function Layer + * ,-------------------. + * |Esc |TAB |BS | = | + * |----|----|----|----| + * | NL | / | * | - | + * |----|----|----|----| + * | 7 | 8 | 9 | | + * |----|----|----|RST | + * | 4 | 5 | 6 | | + * |----|----|----|----| + * | 1 | 2 | 3 | | + * |----|----|----| En | + * | 0 |./FN| | + * `-------------------' + */ + [_FL] = LAYOUT_ortho_6x4( + KC_ESC, KC_TAB, KC_BSPC, KC_PEQL, + KC_NLCK, KC_PSLS, KC_PAST, KC_PMNS, + KC_P7, KC_P8, KC_P9, RESET, + KC_P4, KC_P5, KC_P6, KC_PENT, + KC_P1, KC_P2, KC_P3, KC_PENT, + KC_LEFT, KC_DOWN, KC_UP, KC_RIGHT + ), +}; diff --git a/keyboards/handwired/tritium_numpad/keymaps/ortho_left/keymap.c b/keyboards/handwired/tritium_numpad/keymaps/ortho_left/keymap.c new file mode 100644 index 0000000000..9d569f18a5 --- /dev/null +++ b/keyboards/handwired/tritium_numpad/keymaps/ortho_left/keymap.c @@ -0,0 +1,59 @@ +#include QMK_KEYBOARD_H + +// Each layer gets a name for readability, which is then used in the keymap matrix below. +// The underscores don't mean anything - you can have a layer called STUFF or any other name. +// Layer names don't all need to be of the same length, obviously, and you can also skip them +// entirely and just use numbers. +#define _BL 0 +#define _FL 1 + +const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { + /* Keymap _BL: (Base Layer) Default Layer + * ,-------------------. + * | T | G | B |Spac| + * |----|----|----|----| + * | R | F | V | Fn | + * |----|----|----|----| + * | E | D | C | OS | + * |----|----|----|----| + * | W | S | X | Alt| + * |----|----|----|----| + * | Q | A | Z | Ctl| + * |----|----|----|----| + * | Esc| Tab|Shft| Fn2| + * `-------------------' + */ + + [_BL] = LAYOUT_ortho_6x4( + KC_T, KC_G, KC_B, KC_SPACE, + KC_R, KC_F, KC_V, MO(1), + KC_E, KC_D, KC_C, KC_LGUI, + KC_W, KC_S, KC_X, KC_LALT, + KC_Q, KC_A, KC_Z, KC_LCTL, + KC_TAB, KC_ESC, KC_LSHIFT, MO(1) + ), + + /* Keymap _FL: Function Layer + * ,-------------------. + * | 5 | F5 | F11|Spac| + * |----|----|----|----| + * | 4 | F4 | F10| | + * |----|----|----|----| + * | 3 | F3 | F9 | OS | + * |----|----|----|----| + * | 2 | F2 | F8 | Alt| + * |----|----|----|----| + * | 1 | F1 | F7 | Ctl| + * |----|----|----|----| + * | ` | Del|Shft| | + * `-------------------' + */ + [_FL] = LAYOUT_ortho_6x4( + KC_5, KC_F5, KC_F11, _______, + KC_4, KC_F4, KC_F10, _______, + KC_3, KC_F3, KC_F9, _______, + KC_2, KC_F2, KC_F8, _______, + KC_1, KC_F1, KC_F7, _______, + KC_GRV,KC_DEL, _______, _______ + ), +}; diff --git a/keyboards/handwired/tritium_numpad/keymaps/ortho_right/keymap.c b/keyboards/handwired/tritium_numpad/keymaps/ortho_right/keymap.c new file mode 100644 index 0000000000..0dc2f81bc2 --- /dev/null +++ b/keyboards/handwired/tritium_numpad/keymaps/ortho_right/keymap.c @@ -0,0 +1,61 @@ +#include QMK_KEYBOARD_H + +#ifdef RGBLIGHT_ENABLE +#endif + +// Each layer gets a name for readability, which is then used in the keymap matrix below. +// The underscores don't mean anything - you can have a layer called STUFF or any other name. +// Layer names don't all need to be of the same length, obviously, and you can also skip them +// entirely and just use numbers. +#define _BL 0 +#define _FL 1 + +const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { + /* Keymap _BL: (Base Layer) Default Layer + * ,-------------------. + * |Spac| N | H | Y | + * |----|----|----|----| + * | Fn | M | J | U | + * |----|----|----|----| + * |Left| , | K | I | + * |----|----|----|----| + * |Down| . | L | O | + * |----|----|----|----| + * | Up | / | ; | P | + * |----|----|----|----| + * |Rght| Ret| " |Bspc| + * `-------------------' + */ + [_BL] = LAYOUT_ortho_6x4( + KC_SPACE, KC_N, KC_H, KC_Y, + MO(1), KC_M, KC_J, KC_U, + KC_LEFT, KC_COMM, KC_K, KC_I, + KC_DOWN, KC_DOT, KC_L, KC_O, + KC_UP, KC_SLASH, KC_SCLN, KC_P, + KC_RIGHT, KC_ENT, KC_QUOT, KC_BSPC + ), + + /* Keymap _FL: Function Layer + * ,-------------------. + * |Esc | F12| F6 | 6 | + * |----|----|----|----| + * | NL | M | - | 7 | + * |----|----|----|----| + * |Left| , | = | 8 | + * |----|----|----|----| + * |Down| . | [ | 9 | + * |----|----|----|----| + * | Up | / | ] | 0 | + * |----|----|----|----| + * |Rght| Ret| \ | Del| + * `-------------------' + */ + [_FL] = LAYOUT_ortho_6x4( + _______, KC_F12, KC_F6, KC_6, + _______, _______, KC_MINS, KC_7, + _______, _______, KC_EQL, KC_8, + _______, _______, KC_LBRC, KC_9, + _______, _______, KC_RBRC, KC_0, + _______, _______, KC_BSLS, KC_DEL + ), +}; diff --git a/keyboards/handwired/tritium_numpad/readme.md b/keyboards/handwired/tritium_numpad/readme.md new file mode 100644 index 0000000000..21acfe759c --- /dev/null +++ b/keyboards/handwired/tritium_numpad/readme.md @@ -0,0 +1,28 @@ +Tritium Numpad +=== + +Keyboard Maintainer: QMK Community +Hardware Supported: Handwired 6x4 numpads using promicro controller +Hardware Availability: https://www.thingiverse.com/thing:2855938 + +Wiring is accomplished on the Pro Micro board using the following pins as rows: +* D2 : Row 1 +* D3 : Row 2 +* D4 : Row 3 +* D5 : Row 4 +* D6 : Row 5 +* D7 : Row 6 + +and the following pins as columns: +* A3 : Col 1 +* A1 : Col 2 +* D15 : Col 3 +* D16 : Col 4 + +Make example for this keyboard (after setting up your build environment): + + make tritium_numpad:default + +Bootmagic is enabled. Press the key at 0,0 (usually escape or numlock in the top left corner) while plugging the keyboard in to jump to bootloader. + +See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs). diff --git a/keyboards/handwired/tritium_numpad/rules.mk b/keyboards/handwired/tritium_numpad/rules.mk new file mode 100644 index 0000000000..c990a6ab14 --- /dev/null +++ b/keyboards/handwired/tritium_numpad/rules.mk @@ -0,0 +1,61 @@ +# MCU name +MCU = atmega32u4 + +# Processor frequency. +# This will define a symbol, F_CPU, in all source code files equal to the +# processor frequency in Hz. You can then use this symbol in your source code to +# calculate timings. Do NOT tack on a 'UL' at the end, this will be done +# automatically to create a 32-bit value in your source code. +# +# This will be an integer division of F_USB below, as it is sourced by +# F_USB after it has run through any CPU prescalers. Note that this value +# does not *change* the processor frequency - it should merely be updated to +# reflect the processor speed set externally so that the code can use accurate +# software delays. +F_CPU = 16000000 + +# +# LUFA specific +# +# Target architecture (see library "Board Types" documentation). +ARCH = AVR8 + +# Input clock frequency. +# This will define a symbol, F_USB, in all source code files equal to the +# input clock frequency (before any prescaling is performed) in Hz. This value may +# differ from F_CPU if prescaling is used on the latter, and is required as the +# raw input clock is fed directly to the PLL sections of the AVR for high speed +# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL' +# at the end, this will be done automatically to create a 32-bit value in your +# source code. +# +# If no clock division is performed on the input clock inside the AVR (via the +# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU. +F_USB = $(F_CPU) + +# Bootloader +# This definition is optional, and if your keyboard supports multiple bootloaders of +# different sizes, comment this out, and the correct address will be loaded +# automatically (+60). See bootloader.mk for all options. +BOOTLOADER = caterina + +# Interrupt driven control endpoint task(+60) +OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT + +# Build Options +# comment out to disable the options. +# +BOOTMAGIC_ENABLE = lite # Key at 0,0 makes the keyboard go into bootloader(+1000) +MOUSEKEY_ENABLE = no # Mouse keys(+4700) +EXTRAKEY_ENABLE = yes # Audio control and System control(+450) +CONSOLE_ENABLE = yes # Console for debug(+400) +COMMAND_ENABLE = yes # Commands for debug and configuration +NKRO_ENABLE = yes # USB Nkey Rollover - if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work +RGBLIGHT_ENABLE = no # Enable keyboard underlight functionality (+4870) +BACKLIGHT_ENABLE = yes # Enable keyboard backlight functionality (+1150) +MIDI_ENABLE = no # MIDI controls +AUDIO_ENABLE = no +UNICODE_ENABLE = no # Unicode +BLUETOOTH_ENABLE = no # Enable Bluetooth with the Adafruit EZ-Key HID + +LAYOUTS = numpad_6x4 ortho_6x4 nontra_6x4 diff --git a/keyboards/handwired/tritium_numpad/tritium_numpad.c b/keyboards/handwired/tritium_numpad/tritium_numpad.c new file mode 100644 index 0000000000..7193a934d6 --- /dev/null +++ b/keyboards/handwired/tritium_numpad/tritium_numpad.c @@ -0,0 +1,29 @@ +#include "tritium_numpad.h" +#include "led.h" + +void keyboard_pre_init_kb(void) { + // put your keyboard start-up code here + // runs once when the firmware starts up + keyboard_pre_init_user(); + led_init_ports(); +}; + +void matrix_scan_kb(void) { + // put your looping keyboard code here + // runs every cycle (a lot) + matrix_scan_user(); +}; + +void led_init_ports(void) { + // * Set our LED pins as output + // Numlock LED + setPinOutput(D5); +} + +void led_set_kb(uint8_t usb_led) { + if (IS_LED_ON(usb_led, USB_LED_NUM_LOCK)) { + writePinLow(D5); + } else { + writePinHigh(D5); + } +} diff --git a/keyboards/handwired/tritium_numpad/tritium_numpad.h b/keyboards/handwired/tritium_numpad/tritium_numpad.h new file mode 100644 index 0000000000..8d2e783296 --- /dev/null +++ b/keyboards/handwired/tritium_numpad/tritium_numpad.h @@ -0,0 +1,95 @@ +#pragma once + +#include "quantum.h" + +// readability +#define XXX KC_NO + +/* matrix layout + * ,-------------------. + * | 00 | 01 | 02 | 03 | + * |----|----|----|----| + * | 10 | 11 | 12 | 13 | + * |----|----|----|----| + * | 20 | 21 | 22 | | + * |----|----|----| 23 | + * | 30 | 31 | 32 | | + * |----|----|----|----| + * | 40 | 41 | 42 | | + * |----|----|----| 43 | + * | 50 | 52 | | + * `-------------------' + */ +// The first section contains all of the arguments +// The second converts the arguments into a two-dimensional array +#define LAYOUT_numpad_6x4( \ + k00, k01, k02, k03, \ + k10, k11, k12, k13, \ + k20, k21, k22, \ + k30, k31, k32, k23, \ + k40, k41, k42, \ + k50, k52, k43 \ +) \ +{ \ + {k00, k01, k02, k03}, \ + {k10, k11, k12, k13}, \ + {k20, k21, k22, k23}, \ + {k30, k31, k32, XXX}, \ + {k40, k41, k42, k43}, \ + {k50, XXX, k52, XXX} \ +} + +/* matrix layout + * ,-------------------. + * | 00 | 01 | 02 | 03 | + * |----|----|----|----| + * | 10 | 11 | 12 | 13 | + * |----|----|----|----| + * | 20 | 21 | 22 | | + * |----|----|----| 23 | + * | 30 | 31 | 32 | | + * |----|----|----|----| + * | 40 | 41 | 42 | | + * |----|----|----| 43 | + * | 50 | 51 | 52 | | + * `-------------------' + */ +// The first section contains all of the arguments +// The second converts the arguments into a two-dimensional array +#define LAYOUT_nontra_6x4( \ + k00, k01, k02, k03, \ + k10, k11, k12, k13, \ + k20, k21, k22, \ + k30, k31, k32, k23, \ + k40, k41, k42, \ + k50, k51, k52, k43 \ +) \ +{ \ + {k00, k01, k02, k03}, \ + {k10, k11, k12, k13}, \ + {k20, k21, k22, k23}, \ + {k30, k31, k32, xxx}, \ + {k40, k41, k42, k43}, \ + {k50, k51, k52, xxx} \ +} + +#define LAYOUT_ortho_6x4( \ + k00, k01, k02, k03, \ + k10, k11, k12, k13, \ + k20, k21, k22, k23, \ + k30, k31, k32, k33, \ + k40, k41, k42, k43, \ + k50, k51, k52, k53 \ +) \ +{ \ + {k00, k01, k02, k03}, \ + {k10, k11, k12, k13}, \ + {k20, k21, k22, k23}, \ + {k30, k31, k32, k33}, \ + {k40, k41, k42, k43}, \ + {k50, k51, k52, k53} \ +} + +void keyboard_pre_init_user(void); +void matrix_scan_user(void); + |